

马克斯·普朗克智能系统研究所 (MPI-IS) 的研究人员提出了一种新的磁化重编程方法,可显著扩展磁力机器人形状编程能力的复杂性与多样性。
此前,科学家研发的磁力机器人磁化曲线固定,仅能通过施加外部磁场实现特定形状编程。而此次 MPI-IS 研究团队制造出一个软体机器人,其磁化强度分布可实时、现场改变,相关研究成果已发表于《自然》杂志。
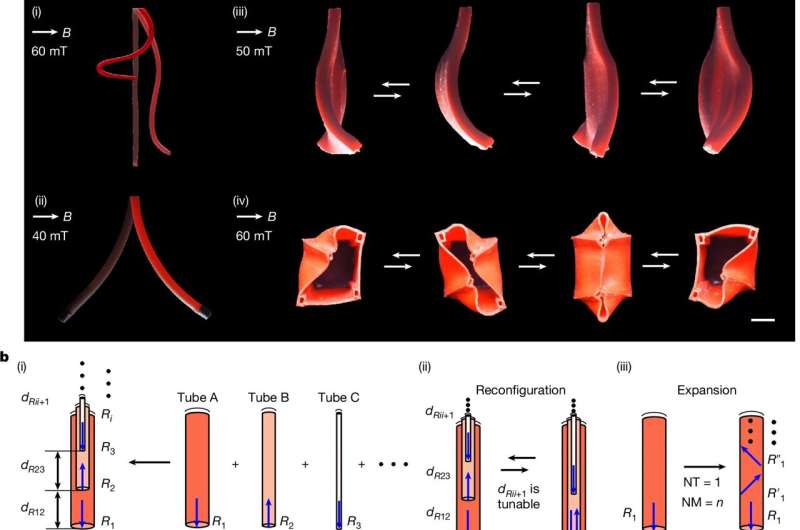
该团队由马克斯·普朗克信息科学学院物理智能 (PI) 系的 Metin Sitti 教授领衔,与土耳其伊斯坦布尔科奇大学合作,将多个管子像俄罗斯套娃般堆叠。每个管包含一个或多个磁性单元,磁化分布可按需预编程。当管的堆叠结构通过非磁性驱动方式改变时,磁性单元相对位置及整个堆叠的磁化分布随之变化。
这种实时、原位的形状生成和变换在以往磁力机器人中难以实现。如今,在磁场恒定的情况下,管子可实现从直线到螺旋线或向相反方向变形,且该方法可扩展至二维和三维框架,能在不改变磁场时实时切换多种变形模式。
尽管马克斯普朗克研究所侧重好奇心驱动的基础研究,但该团队也积极探索此方法的应用场景,如绕过物体、重新编程纤毛阵列以及协调多个仪器合作或独立运行。
这项研究未来在医学领域尤其是血管疾病的微创影像引导治疗中潜力巨大。在血管手术中,导管穿过弯曲血管时与血管壁的摩擦和接触不可避免,可能造成损伤、延缓康复甚至引发并发症,老年患者常因此放弃手术选择药物治疗。而新技术通过实时调整导管磁化曲线以匹配前方路径,在弯曲血管导航时可大幅减少甚至消除摩擦和接触,减少对脆弱组织的损伤,促进更快康复,使血管介入成为部分患者的可行选择。
曾任马克斯·普朗克信息科学研究所(MPI-IS)PI 系主任、现任伊斯坦布尔科奇大学(Koc University)校长的 Sitti 表示,这堆管子或成未来新型导管技术的指导原则,虽目前为基础研究,但未来潜力巨大,有望转化为各种实际应用。
论文第一作者鲍先强称,最初目标是开发实时、原位改变磁化强度分布的方法,研究过程中发现形状保持和磁中和等意外功能,为导管设计和纤毛阵列重编程等技术开辟新可能。论文另外两位共同第一作者王帆和张建华表示,这项基础性工作有诸多潜在应用场景,未来研究将致力于将其融入具体应用并探索其他领域可行性。
更多信息: Xianqiang Bao 等,《软体机器人的实时原位磁化重编程》,《自然》(2025)。