

长久以来,人类和其他动物依靠复杂的生物与神经机制实现身体运动,而机器人专家虽数十年致力于开发模拟这些机制的系统,但驱动方式仍与生物体大相径庭。近日,伊利诺伊大学香槟分校、西北大学等机构的研究人员取得重大进展,开发出新型生物混合机器人,为机器人技术发展带来新曙光。
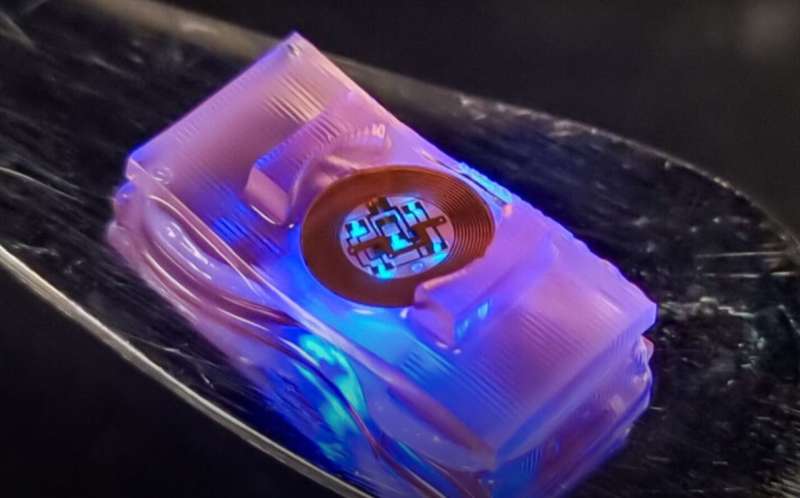
相关研究成果发表于《科学机器人》杂志,这些生物混合机器人别具一格,将小鼠活细胞与带有无线光电子技术的3D打印水凝胶结构相结合。它们具备神经肌肉接头,可借助光遗传学技术控制神经元,模拟出支持人类运动的神经机制。
论文资深作者、伊利诺伊大学厄巴纳 - 香槟分校生物工程教授兼格兰杰工程学院院长Rashid Bashir博士向Tech Xplore表示,这篇论文是过去15年生物混合机器人研究的重要一步,展示了利用神经元控制肌肉,进而控制爬行生物混合机器人运动的关键里程碑。
在人体中,特定身体部位的自主运动由大脑掌控,神经元控制肌肉产生运动力量。巴希尔博士及其同事一直致力于在微型生物混合机器人中重现这一关键生理过程。他们还尝试利用西北大学约翰·罗杰斯教授团队开发的板载无线微型LED,以光学方式刺激和训练神经组织,改变生物混合机器人的运动速度。
研究人员开发的生物混合机器人以一种可通过3D打印技术轻松制造的聚合物支架为基础,该支架由西北大学Yonggang Hwang教授团队运用先进建模和仿真方法精心设计。随后,研究小组采用生物混合组织工程方法,在聚合物支架周围培育生物肌肉组织,增强了支架性能。具体而言,他们将小鼠干细胞分化为运动神经元,并植入3D打印结构上,同时利用营养丰富的培养基促进肌肉组织分化、生长以及神经肌肉接头的形成。
巴希尔解释道,活体肌肉受电、光或神经元刺激时会收缩,若支架设计合理,机器人便会朝特定方向移动。开发这些活机器具有广泛意义,旨在了解生物混合机器和活细胞的设计规则,发挥其生物降解性、低能耗、学习和突发特性等优势。
Bashir及其同事的这项最新研究,有望启发其他机器人专家和遗传学家创建类似系统。未来,这些系统或将在研究运动过程、在生物环境中执行任务以及再生医学等领域发挥重要作用。
巴希尔还补充道,此项工作为创造具有神经组织的生物机器开辟了道路,这种生物机器具备学习、适应和响应刺激的能力。目前,研究团队计划继续深入探索,设计更高阶功能,如学习、记忆和基于外部刺激的决策,同时设计更复杂的运动形式,包括双向运动和跨越障碍的运动。
更多信息: Hyegi Min 等人,微型电子生物混合机器人的光遗传学神经肌肉驱动,Science Robotics (2025)。