

印度科学研究所的研究人员开发出一种新技术,利用磁性微型机器人在活细胞等高粘性生物环境中精确操控量子传感器。这项技术能够实现细胞内部参数的实时、微创测量,例如局部粘度和温度。
印度科学研究所纳米科学与工程中心的教授Ambarish Ghosh表示:“在柔软环境中,测量受限于分析物接近传感器的概率。因此,问题就变成了是否可以将传感器[靠近]并四处寻找分析物。”该研究已发表在《先进功能材料》期刊上。
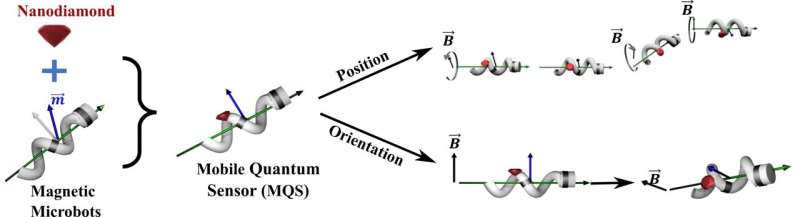
研究团队将含有氮空位缺陷的纳米金刚石量子传感器与磁控微型机器人结合。氮空位缺陷是金刚石晶格中的特殊位置,其量子自旋态会随周围环境变化而改变,从而可测量温度等物理参数。当激光激发纳米金刚石时,产生的荧光可用于细胞内测量,但传统光镊方法可能损伤细胞。
磁性微型机器人技术通过外部旋转磁场驱动螺旋形机器人运动,实现三维空间中的精确导航,无需光操控。这显著减少了光毒性和加热问题。同时,磁操控还能抑制布朗运动引起的噪音,提高传感器稳定性。
研究助理Eklavy Vashist指出:“传感器本身可能受到磁性元件的影响。”团队通过将纳米金刚石放置在距离微型机器人铁头约一微米的位置,使磁场影响降至最低。Ghosh补充说:“我们能够通过磁操控来对抗布朗运动。这使得这个平台比光学或任何其他技术更有前景。”该传感器未来可用于监测活性氧等细胞内部物质,相关研究在癌症和衰老领域具有应用潜力。
出版详情:作者:Sindhu M, Indian Institute of Science;标题:《Magnetic microbots steer quantum sensors inside living cells》;发表于:《Advanced Functional Materials》(2026);期刊信息:《Advanced Functional Materials》。