一款新型触手状水下机器人能够安全地与海上结构互动,有望改变全球海底基础设施的检测和维护方式。这款柔性机械臂由英国国家机器人中心和巴西Senai Cimatec联合研发,采用柔软可弯曲的设计,可在接触时贴合结构表面,相比传统刚性机械臂,在处理精密或复杂海底设备时更具优势。
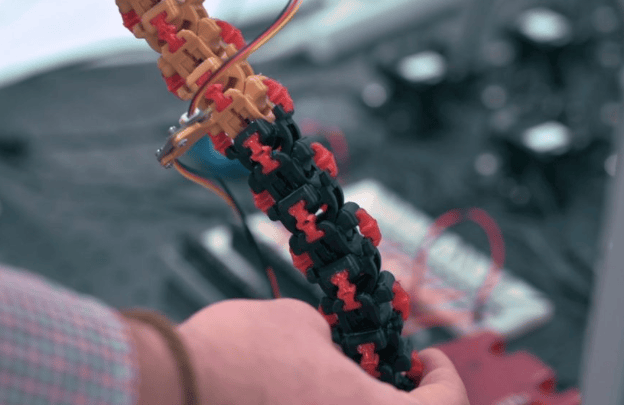
该机器人长约1米,通过柔性骨架与类似肌腱的电缆系统控制运动,配备特殊传感器以感知水下位置和形状,即使在湍流条件下也能实现精确操作。这使得它适合从水下车辆部署,用于检测海上风电场及其他海洋能源设施。
在波浪水池测试中,水下机器人能以极高精度定位触手状臂,承受高达300g外力时保持稳定,即使被干扰也能在几秒内纠正位置,适应不稳定的海洋环境。这一能力对于深度近3000米的海底管道和设备检测至关重要,可帮助延长使用寿命,减少环境影响。
国家机器人中心项目经理Rowanne Miller表示:“这一突破展示了我们端到端的项目交付能力。我们的团队将这一创新的水下机器人从概念设计到真实测试成功实现。它从根本上改变了水下检测任务的处理方式,为与关键海底基础设施进行更安全、更精确的互动开辟了新可能。”
SENAI CIMATEC的首席研究员Lucas Silva表示:“我们与国家机器人中心合作,构想了一种创新的水下操纵方法,为行业开辟了新的应用案例。这一新发展代表了机器人开发路线图的重要升级,顺畅的合作在这一成就中发挥了关键作用。”
该技术主要面向海上能源公司、水下检测服务商和海底基础设施运营商。传统检测方法通常依赖大型船只和人类潜水员,存在安全风险和较高碳足迹。这一创新有望使更小的水下车辆执行复杂检测任务,降低运营成本,提升安全性和环境可持续性。
项目展示了软体机器人如何扩大规模,以解决苛刻环境中的现实工程挑战。国家机器人中心位于赫瑞瓦特大学爱丁堡校区,与爱丁堡大学合作运营。