

美国华盛顿州立大学研究人员开发充气式机器人苹果采摘臂
2026-03-04 09:38
收藏
美国华盛顿州立大学的科研团队开发了一款充气式机器人苹果采摘臂,这款充气式机器人苹果采摘臂低成本设备旨在辅助水果采摘和农场作业,以应对农业劳动力短缺问题。
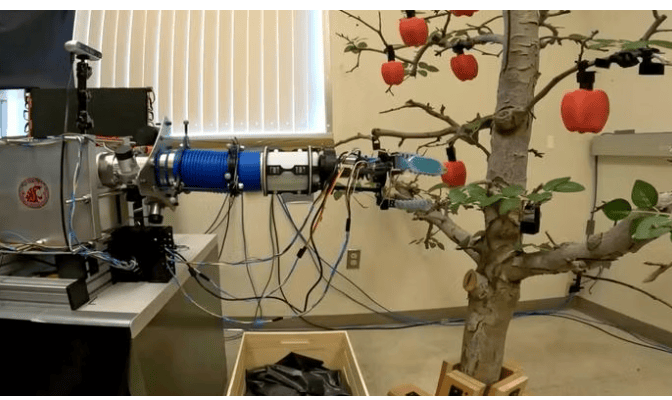
这款充气臂采用柔软织物制成,充满空气后形成两英尺长的臂身,重量不足50磅。它能识别苹果并执行采摘动作,大约25秒可摘取一个果实。华盛顿州立大学机械与材料工程学院的研究人员在《智能农业技术》期刊上发表了相关研究。
研究团队正与普罗斯研究推广中心和康奈尔大学的Manoj Karkee合作,将充气臂适配到自动移动平台上,以便在果园中灵活使用。华盛顿州立大学的助理教授、通讯作者Ming Luo表示:“设计的简单性使其成为一款低成本、易于维护且高度可靠的软体机器人。”
全球果树种植者面临采摘和修剪等操作的劳动力短缺。华盛顿州苹果和甜樱桃产量领先,2023年贡献超过20亿美元GDP,但农场工人需求难以满足。今年秋天,Luo在州内旅行时看到果实腐烂在地,称“这简直是浪费”。
充气式机器人苹果采摘臂的材料成本约5500美元,重量轻,使用安全,不会损害树枝或苹果。它适用于现代苹果园,如平面线性或V形棚架布局。博士生Ryan Dorosh表示:“拥有这种非常低成本、安全的机器人平台对于果园环境来说是理想的。”
与人类采摘者每三秒摘一个苹果相比,这款充气臂速度较慢。研究人员正改进机械部件和检测系统,并开发其执行修剪、疏花和喷洒等任务的能力。他们希望提供成本效益高的解决方案,使农民能购买多个廉价机器人。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
1
中国钢研与沙钢集团签署战略合作协议
2
C919高原型首架机,完成首飞!
3
拜耳宣布将在2028年推出ThryvOn,系巴西首个抗蓟马棉花生物技术
4
蒙古国启动230万头牲畜补充免疫,首次应对SAT-1型口蹄疫
5
2026年APEC林业部长级会议启动参访活动
6
APVMA新规落地一个月后,先正达宣布停止在澳新销售百草枯
7
FAS上调2026-27年度澳大利亚小麦产量预测至3100万吨
8
加拿大Rock Tech与Transamine签署10万吨锂辉石精矿承购协议
9
加拿大Algo Grande铜业墨西哥项目见高品位矿化
10
澳大利亚力拓半年盈利68.5亿美元 同比增长43%
相关视频
原理人尽皆知,精度举国难追,硬核壁垒藏在小数点后!#陀螺仪 #惯性导航 #硬核科普 #精密制造 #工业思维
00:04:16
人类史上最强的一锤!——八万吨锻式液压机!万吨之力,微米之精,工业力量的巅峰!#机械 #液压机 #知识分享 #热门 #制造业
00:02:53
全世界最硬核机器!NASA运输车只算玩具,第一名竟能自我繁殖全世界最硬核的十台巨型机器!NASA运输车只能算玩具,第一名竟然能在百米高空自我繁殖!#世界之最 #top10
00:21:34

今天带你们看一下世界上最大的轮式装载机也是无数重工迷心中的终极梦想,长度超过20米,高度堪比五层楼的钢铁巨兽,小松 WE二三五零。#重工 #机械 #科普
00:04:10

压路机的空心滚筒为啥也能压实地基?3D动画拆解压路机运转逻辑#压路机 #原理 #科普新锐扶持计划 #3D动画 #工地
00:03:27
相关推荐

Roland 美洲推 EU21000MF 生产力约升1.5倍
2026-07-29
中国九州一轨拟不超6.3亿元投建半导体激光隐形切割项目
2026-07-29
一汽铸锻前曲车间完成切边工序与转序系统双线升级!
2026-07-29

投资超4000万,光粒科技AR眼镜研发中心落地温州
2026-07-29

G70型船用发动机曲轴部件圆满发运!
2026-07-29
美国Groeneveld-BEKA与AFEX合作扩至英国南非
2026-07-29

德国德商德静界发布LightLoopIO LCD水冷
2026-07-29

Hiperbaric向西班牙TTT Group交付首台HIP设备
2026-07-29

德国瓦尔特将在2026年AMB和IMTS展会推出两款新品
2026-07-29

美国通用电气因耐久性问题暂停GE9X发动机交付
2026-07-29