
Kassow Robots推出博世力士乐ctrlX OS实时连接器应用,丹麦与德国协作提升工业自动化集成效率
2026-03-20 10:02
收藏
Kassow Robots,一家位于丹麦哥本哈根的七轴轻量级协作机器人生产商,近日为博世力士乐的ctrlX OS操作系统推出了新的实时连接器应用。这一应用实现了协作机器人与ctrlX OS环境的高效集成,简化了工业自动化系统的调试、控制和整合过程。
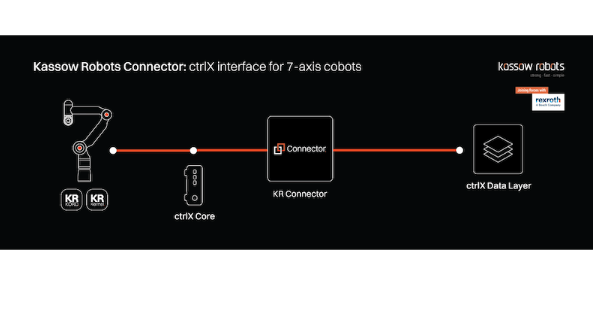
作为博世力士乐的一部分,Kassow Robots通过这个基于应用的接口,扩展了ctrlX Automation平台的功能,使其支持机器人应用。之前,连接ctrlX OS设备与Kassow Robots的协作机器人需要PLC编程,且实时功能有限。新开发的实时连接器应用通过ctrlX数据层提供实时机器人数据,并配备直观的用户界面,用于设置、监控和控制,从而克服了这些限制。
开发者和操作员现在可以直接从ctrlX OS设备连接机器人、执行运动命令、确认警报,并在点动模式下进行交互。该解决方案还支持通过Codesys PLC或ctrlX OS生态系统中的其他应用进行编程。Kassow Robots的创始人兼首席执行官Kristian Kassow表示:“我们的目标是减少客户和合作伙伴的集成复杂性。通过在ctrlX OS上集中控制、数据访问和系统交互,我们帮助加速调试,并实现更灵活、智能的自动化解决方案。”
实时连接器应用允许无缝集成视觉系统、夹持器和人机界面等合作伙伴技术,支持开发智能自动化方案,如码垛、拣箱和移动机器人应用。例如,协作机器人可与博世力士乐Rokit Robotics Kit的定位和导航方案结合,创建多技术移动机器人解决方案。导航、安全、运动控制和机器人控制可通过单个ctrlX OS设备集中管理,主要优势包括统一的控制架构、直接实时通信、减少集成和调试时间,以及通过模块化设计提高系统灵活性。
相关推荐

荷兰霍夫隆20周年新厂开业并发布C10e Gen 3
2026-06-19

苏格兰NMIS试验展示私有5G助力智能制造
2026-06-19

博世发布首款电动自行车轮毂电机:400瓦,2.3公斤
2026-06-19

澳大利亚山特维克钻机部件创25000小时运行纪录
2026-06-19

美国SW北美公司IMTS 2026将展示CNC加工与协作机器人自动化
2026-06-19

力纳克推出紧凑型LA21电动执行器
2026-06-19

中国魔法原子全系列机器人入驻万机易租2.0平台
2026-06-19

德国Luibl接收一台25吨曼尼通伸缩臂叉车
2026-06-19

紫金矿业澳大利亚诺顿金田无人驾驶矿卡投入白班生产
2026-06-19

韩国LS电气涨10.54% 电气设备股受订单预期推升
2026-06-19
最新简讯