
美国麻省理工学院研发超声波腕带,实现手部动作实时控制机械手
2026-03-26 10:05
收藏
美国麻省理工学院的工程师最近开发出一种超声波腕带,能够实时追踪佩戴者的手部动作,并将其转换为机器人的精确指令。该设备利用超声波成像技术捕捉手腕肌肉、肌腱和韧带的动态,结合人工智能算法解析手部位置,实现无线操控机械手或虚拟物体。
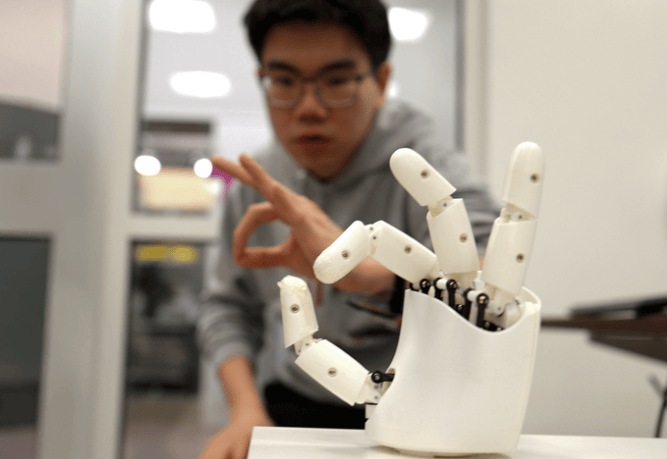
这款超声波腕带通过生成手腕的实时图像,并借助AI算法将这些图像映射到手指和手掌的22个自由度上,从而准确识别手势。在演示中,佩戴者可以控制机械手弹奏钢琴或玩桌面篮球,还能在电脑屏幕上放大缩小虚拟物体。麻省理工学院机械工程教授赵宣和表示:“这项工作在虚拟和增强现实领域有直接应用潜力,可能替代现有手部追踪技术,并为机器人训练提供丰富数据。”
研究团队在发表于《自然·电子学》的论文中详细介绍了超声波腕带设计。他们测试了八名不同手部尺寸的志愿者,涵盖多种手势和抓握动作,包括美国手语的26个字母。结果显示,超声波腕带能精确预测手部位置,克服了传统方法如摄像头系统或传感器手套的局限性,后者易受视觉干扰或限制自然动作。
未来,团队计划进一步小型化硬件,扩大数据集以训练更多手势,目标是构建通用可穿戴追踪器,用于人形机器人操控或虚拟环境交互。这项研究获得多个机构支持,包括美国国家科学基金会和新加坡国家研究基金会。
相关推荐
芬兰维美德推出Bioneer干网 碳足迹可降近30%
2026-06-25
日立建机与福留开发在日本开展远程施工实证试验
2026-06-25

美国卡特彼勒发布2025年报告,销售额676亿美元创新高
2026-06-25

美国通用汽车投1.5亿美元开发2027款凯迪拉克XT5
2026-06-25

中国太重集团自主研发的TZ955装载机顺利下线
2026-06-25
卡特彼勒携手中国代理商升级服务承诺,推出超时赔付
2026-06-25

美国Amaero完成雾化器调试,难熔合金及钛合金年产能分别达200吨和480吨
2026-06-25
全球首个自动驾驶系统全球技术法规获批发布
2026-06-25
LMI Technologies将携Gocator系列亮相2026中国上海AMTS展
2026-06-25
中国美的威灵展出一体化动力模组 推动人形机器人商业化
2026-06-25
最新简讯