
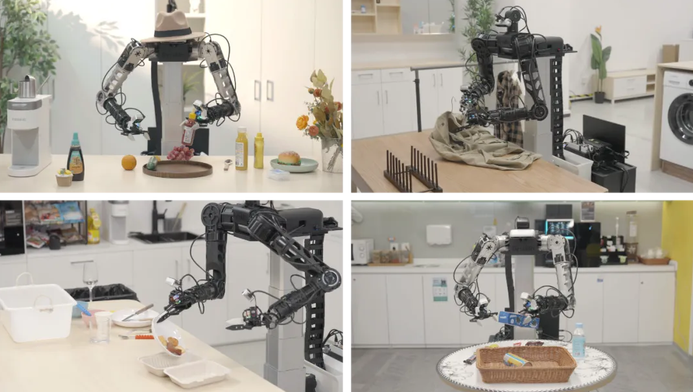
字节跳动发布通用机器人模型 GR-3:配套设计 ByteMini 机器人,支持高泛化、长程任务、柔性物体双臂操作
2025-07-22 14:06
收藏
7月22日,字节跳动Seed团队发布通用机器人模型GR-3。据介绍,与此前需要大量机器人轨迹训练的VLA模型不同,GR-3通过少量的人类数据即可实现高效微调,从而快速且低成本地迁移至新任务,以及认识新物体。此外,GR-3能有效处理长程任务并能进行高灵巧度的操作。同时,字节跳动Seed团队还开发了一款通用双臂移动机器人ByteMini,配套设计的ByteMini机器人搭载GR-3模型,可高效在真实环境中处理复杂任务。据该团队介绍,机器人操作大模型后续研究计划包括扩大模型规模和训练数据量、引入强化学习训练。
相关推荐

苏格兰NMIS试验展示私有5G助力智能制造
2026-06-19

6月18日美国SpaceX市值2.6万亿美元一度超越亚马逊
2026-06-19

美国SpaceX获三大机构投资级信用评级,展望稳定
2026-06-19
美国Coupa推出代理框架,Q1支出超5000亿美元
2026-06-19

三大开源峰会9月在中国上海联合举办
2026-06-19

iKOMG与欧洲广播公司签多平台分发协议
2026-06-19
美国Baseten筹集15亿美元融资
2026-06-19

中国人大与微软研究院推出Arbor框架 性能提升超2.5倍
2026-06-19

美国波音Q4S量子纠缠交换测试成功,计划2027年发射
2026-06-19
印度Hexaware Technologies投资2500万英镑扩张英国研发及量子计算
2026-06-19
最新简讯