
中国科学院成功研发自主显微眼科手术机器人系统
2026-01-20 09:20
收藏
1月19日,中国科学院自动化研究所多模态人工智能系统全国重点实验室边桂彬研究员课题组宣布,成功研发出一款自主显微眼科手术机器人系统,并验证了其临床可行性。该手术机器人系统能够在整个眼内空间实现自主视网膜下和血管内注射,显著提升眼底注射的精确性、安全性和一致性,最大限度减少医源性损伤,为眼科手术带来革新。
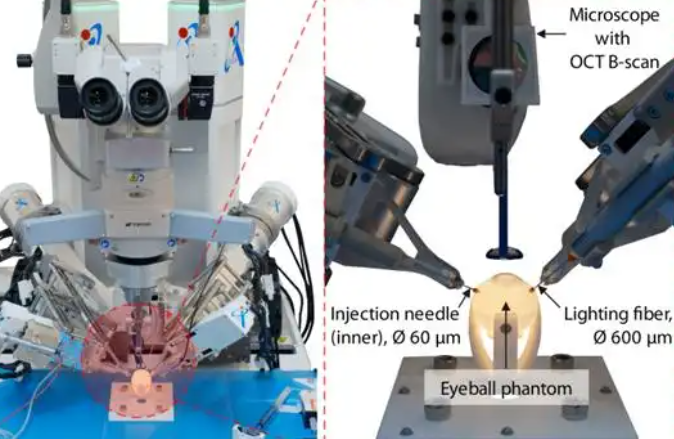
眼睛软组织结构精细、操作空间狭小,医生在眼内手术中的手动操作面临巨大挑战。该手术机器人系统通过智能、精准的操作控制,有效提升了手术安全性,缩短了外科医生的学习曲线。研究团队创新性地构建了从术中三维空间感知、跨尺度精确定位到轨迹精准控制的核心算法模块。在三维空间感知方面,系统提出多视角空间融合方法,构建术中动态更新的全局三维地图;在精确定位方面,采用多传感器数据融合方法,实现手术器械尖端的宏观-微观定位;在轨迹控制方面,通过多约束目标优化方法,确保手术轨迹的精准与安全。
实验验证中,该手术机器人系统在眼球假体、离体猪眼球及活体动物眼球的视网膜下注射与血管注射中均实现100%注射成功率。与医生手动手术及医生主从操作机器人手术相比,平均定位误差分别减少79.87%和54.61%,表现出更高的安全性和精准性。
这一研究成果为眼内手术的自主化开辟了全新路径,验证了手术机器人系统在显微手术中应用的可行性。
相关推荐

澳大利亚布莱顿健康校园新增一间医学影像科
2026-06-04
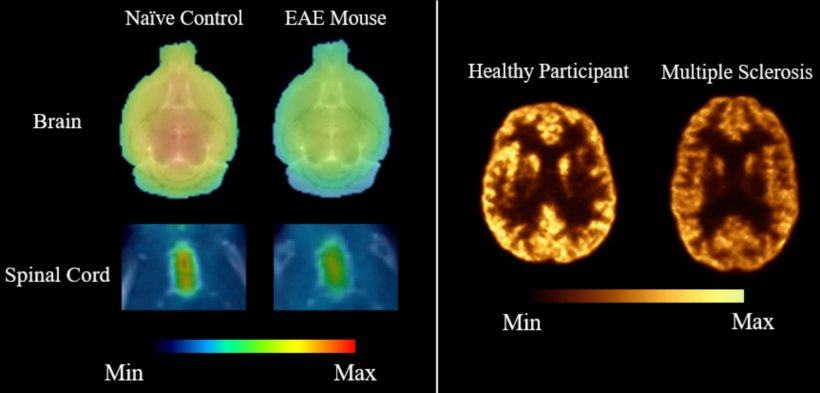
加拿大研究:PET成像揭示多发性硬化突触密度降低16.4%
2026-06-04
英国阿尔德利公园7.1万平方英尺建筑将改建为私立医院
2026-06-04

英国Flok Health获1250万美元融资拓展AI理疗平台
2026-06-04

英国QCS收购CareBrain加速护理行业转型
2026-06-04

美国加州大学与英国牛津大学开发可穿戴超声贴片实现持续胎儿监测
2026-06-04
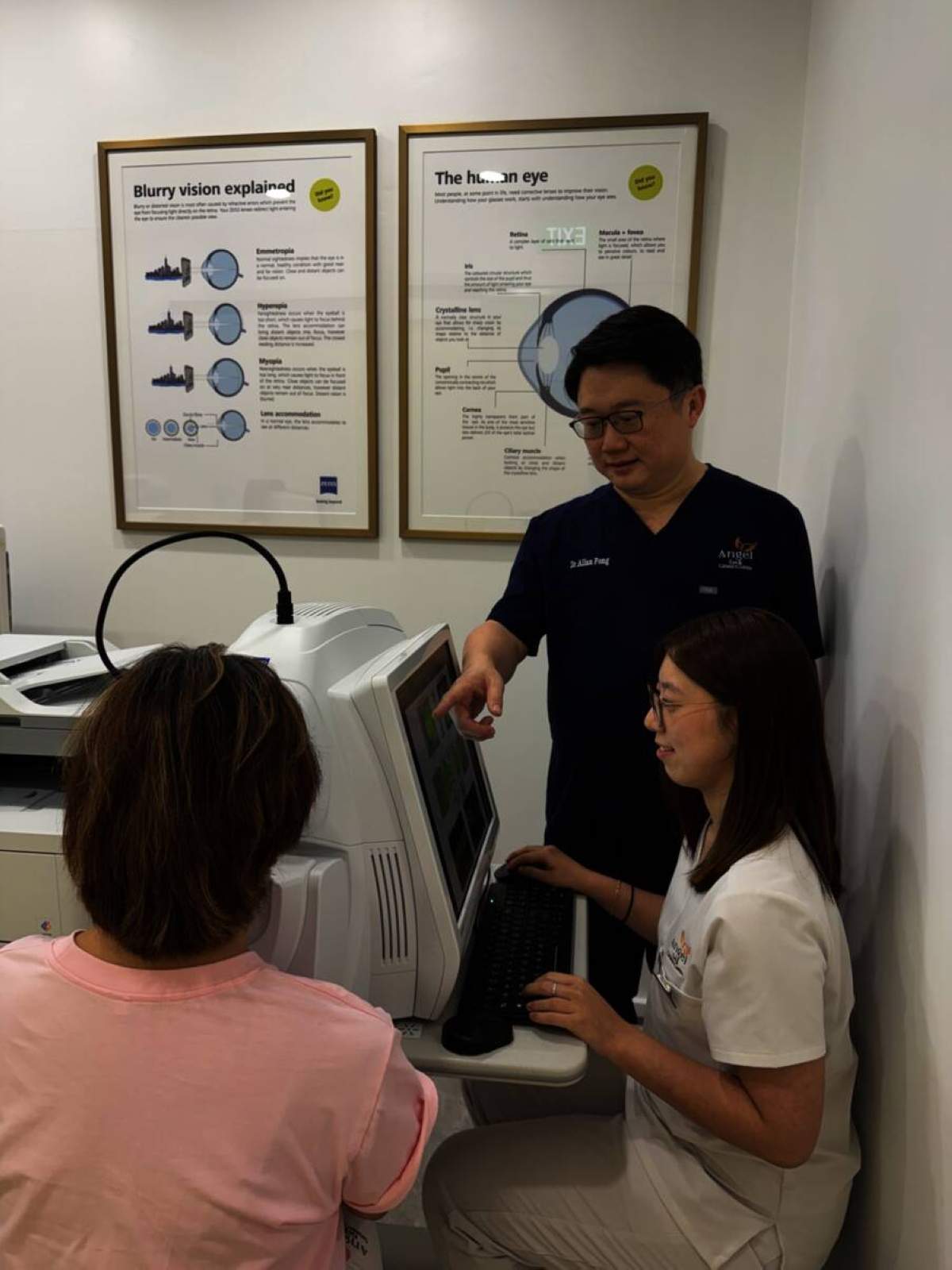
新加坡Angel Eye引入AI视网膜筛查助术前评估
2026-06-04

突尼斯实现前列腺癌关键放射性药物本土生产
2026-06-04
法国团队开发出Otosurg 3D打印耳部手术模拟器
2026-06-04

美国量化路径新增斯蒂芬斯博士扩充食品安全团队
2026-06-04