
中国科学院沈阳自动化研究所具身智能研究成果获ICLR 2026收录
2026-02-10 10:22
收藏
近日,中国科学院沈阳自动化研究所机器人学研究室机器智能研究组在具身智能导航与低秩张量恢复理论方面取得系列进展,相关中国科学院沈阳自动化研究所成果已被人工智能领域国际学术会议ICLR 2026正式录用。
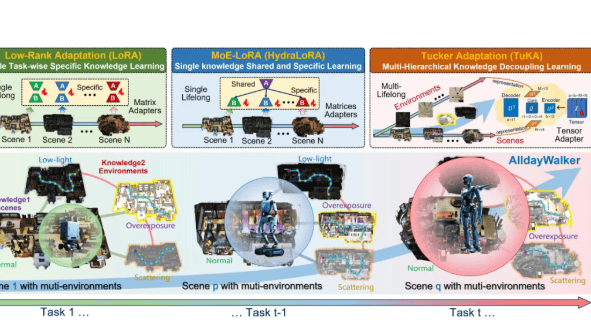
由博士生王旭东、实习生李干作为第一作者,韩志研究员担任通讯作者的研究团队,提出了一种名为TuKA的基于Tucker分解的高阶张量适配框架。该框架旨在解决视觉语言导航智能体在跨场景部署时面临的“灾难性遗忘”及多层级知识捕捉难题。TuKA将导航知识建模为高阶张量,并解耦为共享与特定部分,配合解耦知识增量学习策略,使智能体能在学习新技能时巩固旧知识。基于此框架开发的Allday Walker机器人在多种复杂工况测试中表现良好。
在另一项关于仿人类终身学习框架的研究中,第一作者博士生王旭东、董家华博士与通讯作者刘柏辰助理研究员、韩志研究员提出了终身具身导航框架Uni-Walker。该框架通过创新的解码器扩展架构,将导航知识解耦为共享与特定组件,利用知识继承与专家共激活策略促进知识迁移,并引入专家子空间正交约束与导航专用思维链机制,以应对连续学习多场景任务时的知识遗忘问题。
在理论基础研究方面,由博士生刘志裕为第一作者、王尧教授为通讯作者的研究团队,针对低管秩张量恢复在噪声环境下的挑战,深入分析了小初始化梯度下降算法的理论边界。研究首次证明,在存在加性噪声时,采用该策略的算法能以线性速率收敛至接近信息论最优误差,并揭示了其隐式正则化特性,为处理高维数据恢复任务提供了理论依据。
这些被ICLR 2026录用的研究成果,展现了中国科学院沈阳自动化研究所团队在具身智能导航算法创新与理论基础探索方面的持续努力。
相关推荐

法国雷诺泰雷兹推4 TROOP移动指挥车原型
2026-06-28

印度马恒达推出BLAZO X自卸车及CEV5工程设备
2026-06-28

三一印度展示本土化零部件与电动矿用自卸车
2026-06-28

现代汽车在韩国发布第八代紧凑型轿车Avante
2026-06-28

中国南方路机亮相英国Hillhead 2026展会
2026-06-28

中国柳工电动装载机订单增100%,前5月出口增近50%
2026-06-28

中国山河智能在长沙举办电动挖掘机品鉴会 签署近40台订单
2026-06-28

英国人工智能与机器人公司Humanoid与西门子人形机器人物流验证 60次/时
2026-06-28
德国Open Mind发布hyperMILL 2026版本 提升NC程序创建速度和工艺可靠性
2026-06-28

韩国HD现代重工与J Ocean重工签署群山造船厂转让正式合同
2026-06-28
最新简讯