

人工智能 (AI) 的进步开启了能够适应环境的自动化机器人的新时代。
过去几十年来,机器人领域取得了令人瞩目的进步,但仍面临诸多挑战,阻碍其潜力得到充分发挥。传统机器人通常依赖预先编程的指令和受限的配置,这限制了它们应对突发情况的能力。人工智能技术——涵盖认知、分析、推理和决策——使机器人能够智能地运行,显著提升其协助和支持人类的能力。
通过在工程系统中为机器人增强人工智能技术,我们可以期待机器人在工业、农业、物流、医疗等领域得到更广泛的应用,使其能够更自主、更高效地执行复杂任务。这项技术提升将释放机器人在实际应用中的潜力,为紧迫的医疗和环境问题提供解决方案,并在工业革命4.0的背景下推动向智能制造的范式转变。
借助人工智能的应用,由香港理工大学机械工程系智能机器人及自动化讲座教授、南京理工大学科技创新研究院院长张丹教授领导的研究团队,研制出多种具有高动态性能的新型机器人系统。
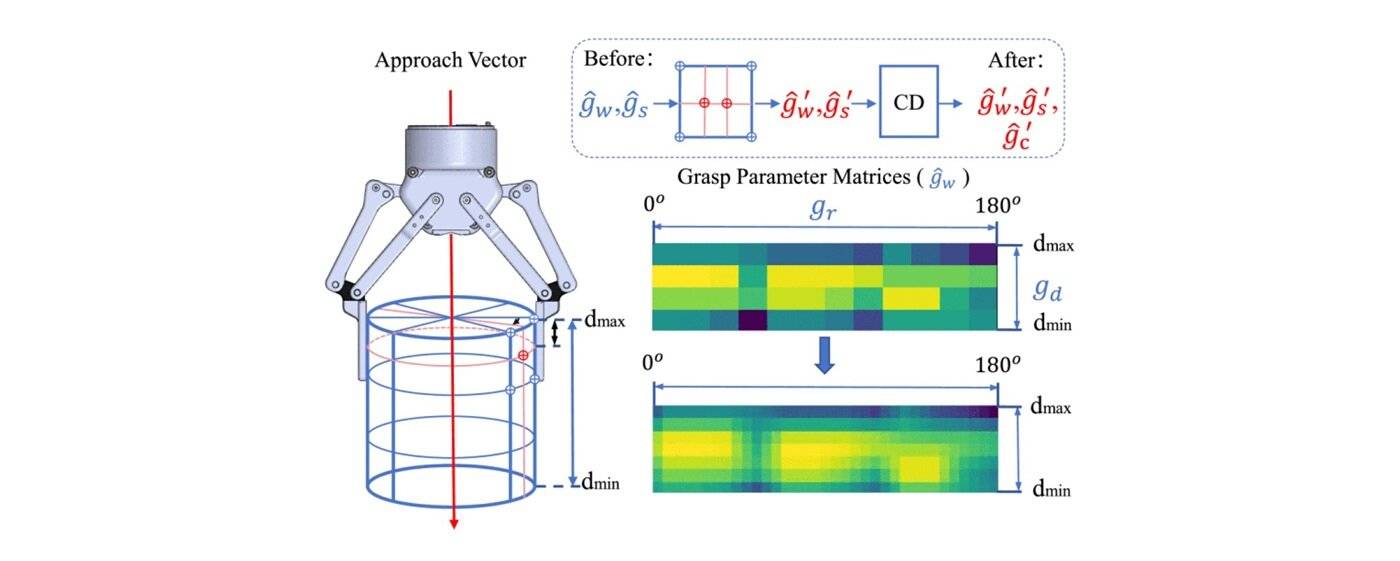
张教授的研究团队最近提出了一个抓握姿势检测框架,该框架利用深度神经网络生成一组丰富的全向(六自由度,简称“6-DoF”)高精度抓握姿势。为了检测待抓握的物体,卷积神经网络(CNN) 被应用于一个半径各异的多尺度圆柱体,提供有关每个物体位置和尺寸估计的详细几何信息。
多个多层感知器 (MLP) 优化了机械臂抓取物体的精度参数,包括夹持器宽度、抓取分数(针对特定的平面内旋转角度和夹持器深度)以及碰撞检测。这些参数被输入到框架内的算法中,从而扩展预设配置的抓取能力,生成针对场景定制的全面抓取姿势。
实验表明,所提出的方法在实验室模拟中始终优于基准方法,在实际实验中平均成功率为 84.46%,而基准方法的平均成功率为 78.31%。
此外,研究团队利用人工智能技术,提升新型机器人膝关节外骨骼的功能和用户体验,用于膝关节损伤患者的步态康复。该外骨骼的结构包括一个由电动机驱动的执行器,用于主动辅助膝关节屈伸;一个将外骨骼重量转移到地面的踝关节;以及一个由另一个电动机驱动的刚度调节机构。
机器学习算法中采用长短期记忆(LSTM) 网络,模拟人体膝关节的生物力学特性,提供实时非线性刚度和扭矩调节。该网络基于大量肌电图 (EMG) 信号和膝关节运动数据进行训练,能够根据用户的生理信号和运动状态实时调整外骨骼的刚度和扭矩。通过预测必要的调整,该系统能够适应各种步态需求,提升用户的行走稳定性和舒适度。
基于径向基函数 (RBF) 网络的自适应接受控制算法的集成,使机器人膝关节外骨骼能够自动调整关节角度和刚度参数,而无需力或扭矩传感器。这提高了位置控制的精度,并改善了外骨骼对不同步行姿势的响应能力。这种数据驱动的方法可以优化模型的预测,并随着时间的推移提高整体性能。
实验结果表明,该模型在准确性和实时响应性方面优于传统的固定控制方法,能够为不同步行速度的用户生成所需的参考关节轨迹。
张教授及其团队的研究表明,人工智能技术,尤其是深度学习,提升了机器人感知和理解环境的能力。这一进步有助于提供更有效、更灵活的解决方案,以处理超出标准设置中固定配置的任务。
人工智能与机器人技术的融合不仅提高了精度和准确度,还为机器人自动化带来了新的能力,使其能够实时决策和持续学习。因此,机器人的性能可以随着时间的推移不断提升,从而在未来的社会中进一步扩大机器人的应用。
更多信息: Dan Zhang 等人,《智能适应:动态环境中人工智能与机器人技术的融合》(2024 年)