

《npj Robotics》杂志发表了一项由法国国家信息和自动化研究所 (Inria)、法国国家科学研究中心 (CNRS)、洛林大学和艾克斯 - 马赛大学研究人员团队主导的新研究,成功解决了小型四旋翼飞行器在直径仅 35 厘米(14 英寸)风管中飞行的难题,为进入和检查高度受限环境开辟了新途径。
在现代建筑与地下管网中,通风管道分布广泛,但因其尺寸狭窄且无法承载人体重量,进入检查以维持空气质量、供暖及空调正常运转面临挑战。小型四旋翼无人机虽具备水平和垂直飞行能力,为探索风管提供了潜在方案,然而飞行时产生的气流会在风管内部循环,导致无人机不稳定,在容错空间有限的环境中形成严重湍流。
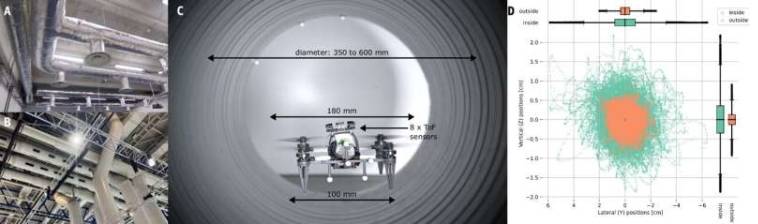
为攻克这一难题,研究团队首先研究无人机在风管中的位置对空气循环的影响,借助机械臂和力/扭矩传感器测量了数百个位置的力。第一张力的“图”清晰呈现复杂的空气动力学模式,可识别出圆形管道中空气再循环会将无人机推向墙壁的“不安全”部分,以及再循环力相互抵消的更安全位置。
鉴于风管环境通常黑暗且无视觉提示,无人机需知晓自身当前位置以保持在建议点。研究团队将小型激光器与基于运动捕捉数据训练的人工智能神经网络相结合,使小型无人机能在湍流最小的位置保持飞行,实现更安全、稳定的飞行状态。
该研究成果为无人机在工业检测和公共安全领域带来新的广阔应用前景。目前,研究团队下一步计划是开发更具应用导向的原型,并为其搭载摄像头、热像仪或气体传感器等实用有效载荷。
更多信息: Thomas Martin 等,《空气管道飞行》,npj Robotics (2025)。