

2025年7月,卡迪夫大学和河海大学研究团队的一项研究成果发表于《IET 网络系统与机器人》期刊,为机器人导航领域带来重大突破。该团队开发出全新深度强化学习(DRL)模型,可帮助机器人在复杂室内环境中规划更智能、更安全的路径,朝真正自主的机器人系统迈出重要一步。
对于机器人而言,无地图导航极具挑战,尤其在无法准确确定自身位置时。传统导航方法存在诸多局限,要么依赖详细地图,要么假设能始终获得精确定位,在室内或陌生环境中易失效。视觉同步定位与地图构建(SLAM)系统虽常作后备方案,但在缺乏清晰纹理或突然移动时也容易失效。许多先前的人工智能模型,或只专注寻找无碰撞路径,或依赖僵化惩罚阈值,难以适应不断变化的环境,迫切需要更灵活、以感知为导向的导航策略。
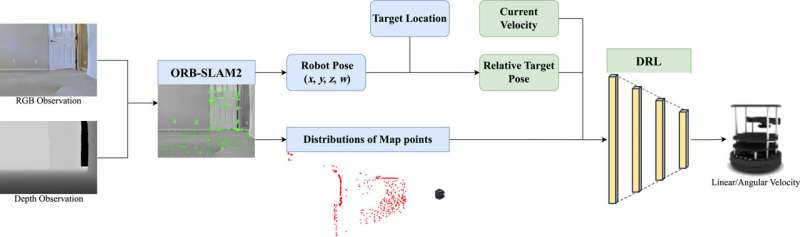
此次研究团队引入基于RGB-D摄像头输入和ORB-SLAM2实时反馈训练的定位感知导航策略。其核心创新在于将定位质量融入每个导航决策,机器人使用反映视觉地图点空间分布、划分为24个角度区域的紧凑状态表示进行训练,能识别视觉上“更安全”的方向。同时,引入基于相对姿态误差(RPE)的新奖励函数,采用动态阈值,可根据环境条件实时调整,即时反馈运动动作对位置理解的影响。
为评估该方法,团队在iGibson模拟环境进行广泛训练,并与四种基准方法测试。结果显示,在具有挑战性的室内场景中,新模型成功率高达49%,远超传统基于SLAM导航方法的33%,还表现出显著更低的定位误差和更强的新环境适应性,且始终选择更长但更安全的路线,体现了优先定位稳健性的价值。
该研究资深作者泽吉博士表示,目标是教会机器人思考自身对位置的了解程度,在每一步保持对自身位置的信心,通过整合感知和规划实现更智能、更安全的移动。
这项研究意义深远,涵盖室内机器人领域,从医院和家庭的服务机器人到仓库自动化系统。在GPS无法工作且视觉条件变化的环境中,该方法使机器人能根据对周围环境的观察和理解调整策略。展望未来,研究团队计划在真实机器人和有行人的动态场景中测试模型,随着进一步发展,有望成为在真实人类环境中实现可靠、无地图导航的关键基石。
更多信息: Yan Gao 等,《深度强化学习在感知定位无地图导航中的应用》,IET 网络系统与机器人技术(2025)。