

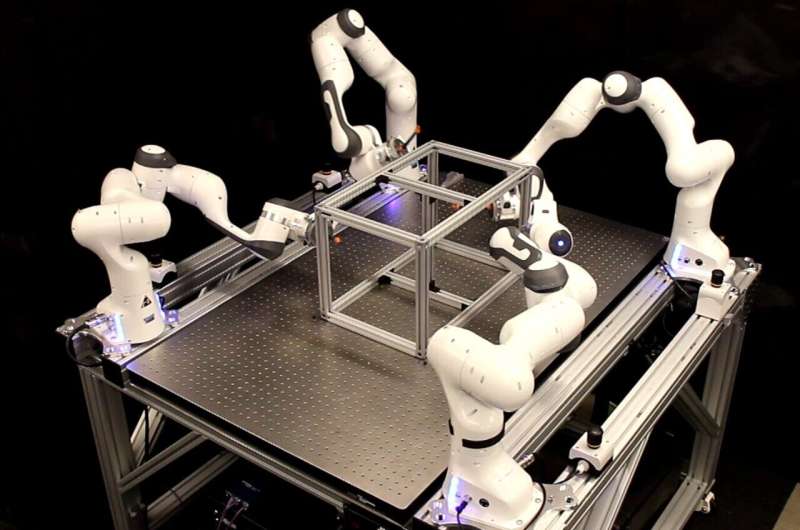
近日,由伦敦大学学院、Google DeepMind和Intrinsic公司联合开发的新型AI算法系统RoboBallet,通过图神经网络与强化学习技术,使大型工业机器人集群能够在复杂环境中实现高速协同作业,将传统需数百小时的人工路径规划缩短至秒级。该研究发表于《Science Robotics》期刊。
其技术核心突破点包括:
智能协同规划 :基于图神经网络架构,使机器人能够将环境障碍抽象为网络节点进行推理,通过强化学习训练获得协同策略
超实时规划能力 :训练数日后即可在秒级时间内生成40项任务、8个机械臂的协同方案,速度较传统方法提升数百倍
场景泛化能力 :对未见过的新布局同样有效,突破传统算法只能处理特定场景的限制
据介绍:论文第一作者、UCL计算机科学博士研究员Matthew Lai领导团队采用强化学习框架,通过"试错-奖励"机制训练机器人系统。系统在完成速度更快的任务时获得更高奖励,最终学会生成高效无碰撞的路径规划。其图神经网络架构使机器人能够理解环境拓扑关系,而非机械记忆特定场景。当机器人故障或布局变更时,系统可瞬间重新规划路径。"当前工厂中协调多机械臂如同求解动态三维谜题,专业人工规划需耗时数百小时。RoboBallet让机器人能以超人类精度实现芭蕾舞般的协同优雅性。"
更多信息:Matthew Lai 等人,《RoboBallet:利用图神经网络和强化学习规划多机器人伸展》,《科学机器人》(2025)。DOI:10.1126/scirobotics.ads1204