

在自然界中,鸟类聚集高效觅食移动、鱼类成群躲避捕食者、蜜蜂集群促进繁殖,这些自然行为蕴含着独特的智慧。如今,人工智能领域正试图模仿这些行为,通过协调无人机或机器人的运动,改进搜救行动、识别广阔区域野火等。然而,开发控制和利用这种人工智能(群体智能)的方法困难重重。
近日,在《美国国家科学院院刊》的一篇论文中,一个国际科学家团队描述了旨在提高群体智能的新框架,即以类似自然界的方式控制群集和蜂拥。
荷兰拉德堡德大学唐德斯认知中心助理教授、论文作者之一马坦·亚·本·锡安指出,设计机器人群体的一大难题是找到分散的控制机制。自然界中的鱼类、蜜蜂和鸟类无需单一领导者或指令就能形成有序结构并良好运作,而合成群体灵活性差,大规模控制更是难以实现。
为应对挑战,包括纽约大学科学家马蒂亚斯·卡西尤利斯(Mathias Casiulis)和斯特凡诺·马蒂尼亚尼(Stefano Martiniani)在内的研究团队,开发了自推进粒子聚集的几何设计规则。这些规则采用自然计算建模,类似于质子和电子中作为物质形成基础的“正”“负”电荷。
根据规则,受外力运动的活性粒子具有导致其弯曲的内在属性——“曲率”。纽约大学物理学、化学和数学助理教授马丁尼表示,曲率驱动群体集体行为,意味着有可能控制群体是聚集、流动还是聚集成群。
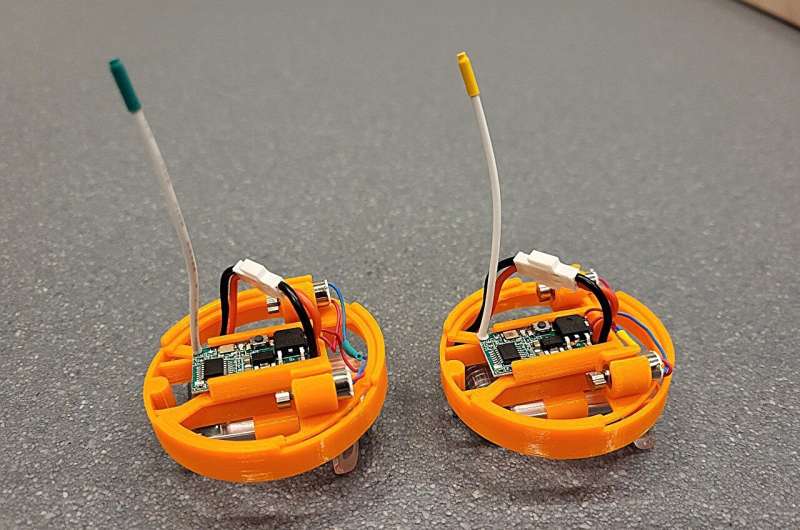
一系列实验证实了该团队的结论。实验表明,基于曲率的标准能控制机器人对之间的吸引力,且可自然扩展到数千个机器人。每个机器人被视为具有正或负曲率,类似电荷,曲率控制着机器人间的相互作用。
本·锡安解释,这种类似电荷的“曲率”可直接编码到机器人的机械结构中,其值决定机器人相互吸引聚集或相互偏转成群的方式。他还提到,找到曲率等几何性质的设计规则,可应用于工业或配送机器人、细胞大小的微型机器人,有望改善药物输送和其他医疗治疗。
卡西尤利斯补充,这些规则基于基本力学,在物理机器人中实现简单。从更广泛层面看,这项工作将控制群体的挑战转化为材料科学的练习,为未来群体工程提供了简单的设计规则,为高端设备制造领域开辟了新的发展方向。
更多信息: Mathias Casiulis 等人,《机器人群体凝聚力与集群-群体转变的几何条件》,《美国国家科学院院刊》(2025 年)。