

裂缝识别在民用基础设施监测中占据举足轻重的地位。传统检测方法虽有一定成效,但高度依赖人力,且效率有限。为破解这一难题,一项新研究提出了完全自主裂缝检测框架,旨在利用人工智能与无人机技术,实现裂缝的自主分割与探测。
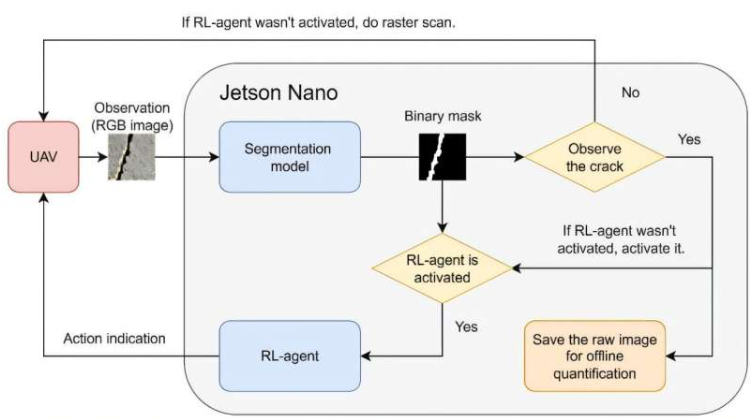
该自主裂缝检测框架依托深度强化学习技术,训练出一个能够自适应跟踪裂缝模式的自主代理。这一代理不仅能在无人操作的情况下自行导航,还能根据裂缝特征智能调整搜索策略,从而最大化检测效率。研究数据显示,该系统在训练数据集中成功捕获了超过85%的裂缝,在测试数据集中也实现了82%的覆盖率。此外,与传统的穷举搜索方法相比,新系统在计算资源方面提高了64%的效率,显示出在无人机和其他边缘设备上实际部署的巨大潜力。
研究通讯作者Rih-Teng Wu教授指出:“所提出的框架展示了人工智能和无人机集成如何将结构健康监测转变为更安全、更快速、更可靠的过程。”这一创新框架不仅显著降低了结构健康监测所需的时间和人力成本,还提高了检查频率,有助于更早地发现潜在的结构问题,进而提升民用基础设施的安全性和耐久性。随着技术的不断进步,自主裂缝检测框架有望在更多领域得到广泛应用,为结构健康监测领域带来革命性的变革。
更多信息: Chun-Hao Fan 等,基于深度强化学习的机器人自主裂缝分割与探测检测,《建筑自动化》(2025)。