

哈佛大学约翰·保尔森工程与应用科学学院研究人员设计出一种新的机器人膝关节设计方法——滚动接触关节。该方法受人类膝盖奇妙物理结构启发,旨在制造出更好的机器人抓手、更适合人类的辅助设备,以及能像动物一样优雅移动的机器人。这一新设计方法发表于《美国国家科学院院刊》,它优化了计算机上滚动关节的设计方式,通过同时调整关节每个关键部件的形状,使其与所需的力或应用相匹配。
研究团队成员科尔特·德克尔表示,若将机器人所需执行的任务决策融入其机械结构中,就能制造出更高效的机器人,能量可精准分配到所需之处,使用更小的执行器。资深作者罗伯特·J·伍德称,目标是将更多运动控制工作交给机器人的机械结构和材料,让控制系统专注于任务层面目标,科尔特的方法实现了这一点。开发此方法的灵感源于伍德实验室制造软体机器人抓手的项目,滚动接触关节具有灵活性、低摩擦和高耐磨性等优势。
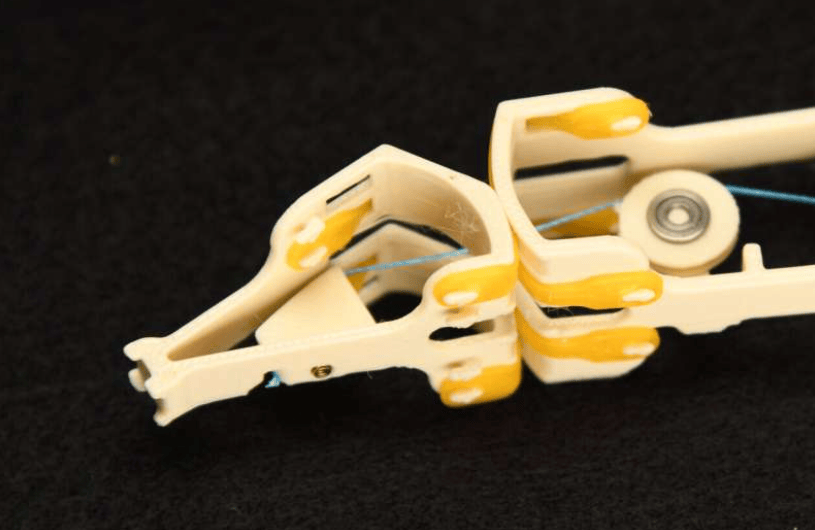
为展示新设计方法,团队制造了类似膝盖的关节和双指机器人夹爪两个原型。优化后的滚动接触关节能更紧密模拟真实膝关节运动,与标准装置相比,矫正错位率高达99%,预示未来膝关节支具等设备可精准定制。原型机器人夹爪在相同执行器输入下,抓取重量是同类产品的三倍以上。新数学方法允许非圆形和不规则形状沿不寻常路径运行,可针对不同应用优化类人关节。德克尔称,这为探索特定任务机器人、辅助机器人及动物生物力学研究等开辟了许多途径。
出版详情:作者:Wood, Robert J.,标题:《非圆形滚动接触关节使机器人连杆机构能够实现程序化行为》,发表于:《美国国家科学院院刊》(2026)