
类人机器人在工业自动化中的挑战与替代方案
2026-02-27 14:18
收藏
类人机器人近年来成为工业自动化领域的热点,其目标是用模仿人类灵活性的机器替代人力。然而,人形设计带来了稳定性、可靠性和安全性方面的独特挑战,引发了对这种技术路径的重新思考。
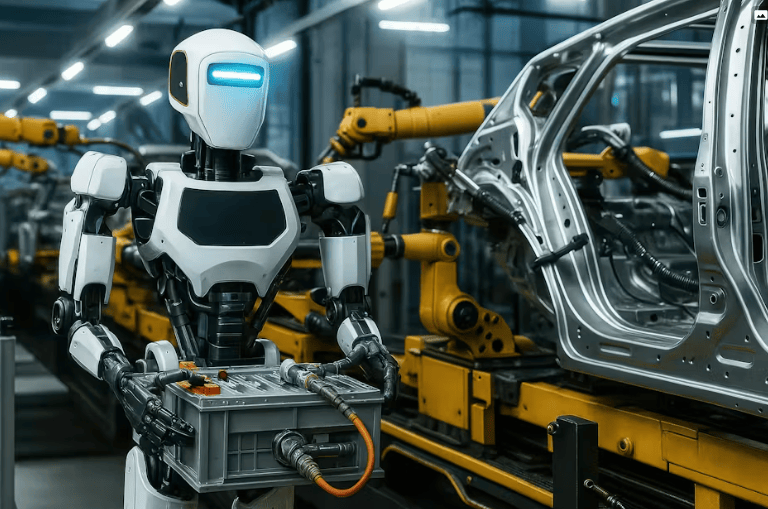
从进化角度看,人体适应了游牧狩猎采集的生活方式,具有朝前眼睛、较高重心和灵巧手部等特征。但这些设计也导致类人机器人在稳定性和敏捷性上不如四足动物,且不适合重复性任务,容易因长期磨损而受损。此外,类人机器人拥有约200个自由度,机械复杂性高,难以匹配工业机械臂的可靠性,其尺寸和形状也限制了应用范围。
在安全方面,类人机器人面临稳定性风险,任何电源中断或关节故障都可能导致跌倒。根据ISO 13849-1和ISO/TR 14121-2标准,评估防止跌倒的性能等级需考虑伤害严重性、频率和避免性。在复杂环境中,实现高安全等级要求冗余设计、高质量组件和细致关注,这增加了技术难度和成本。
当前类人机器人行业实践显示,稳定性和可靠性声明不足,跌倒案例频发,安全重视程度受质疑。监管框架如ISO 10218-1和ISO/TS 15066主要针对工业机械臂,对类人机器人移动性风险覆盖有限。现有标准如ISO/WD 25785-1仍在发展中,监管不成熟可能带来安全隐患。
类人机器人在工业自动化中的前景引发讨论,其安全水平可能低于工厂中围栏后的机械臂。替代方案是设计任务定制的机器人,如自主移动机器人、工业机械臂、SCARA和delta机器人,这些专业化方案提供更稳健、安全和可扩展的自动化路径。通过优化类人机器人技术或转向专用设计,工业自动化可实现更高效发展。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯



相关推荐

英国Rockleigh购入两台RA21蜘蛛式升降机
2026-08-02

澳大利亚Loughlin购入22吨Franna AT22-2
2026-08-02

印度Sterlite获11亿美元订单 受益AI数据中心热潮
2026-08-02

美国菲利普斯向海军学校交付12套混合制造及12套复合材料系统
2026-08-02

德国Gefertec推出Arctitan钛金属3D打印系统
2026-08-02

岚图汽车2026年7月交付13189辆
2026-08-02

中国山东新能船业7月向多国交付船舶,单月交付额破2亿元
2026-08-01

法国ENGO完成3934万元融资,布局Micro OLED智能运动眼镜
2026-08-01

英国RMP投资Ficep系统2025年实现板材产能翻倍
2026-08-01
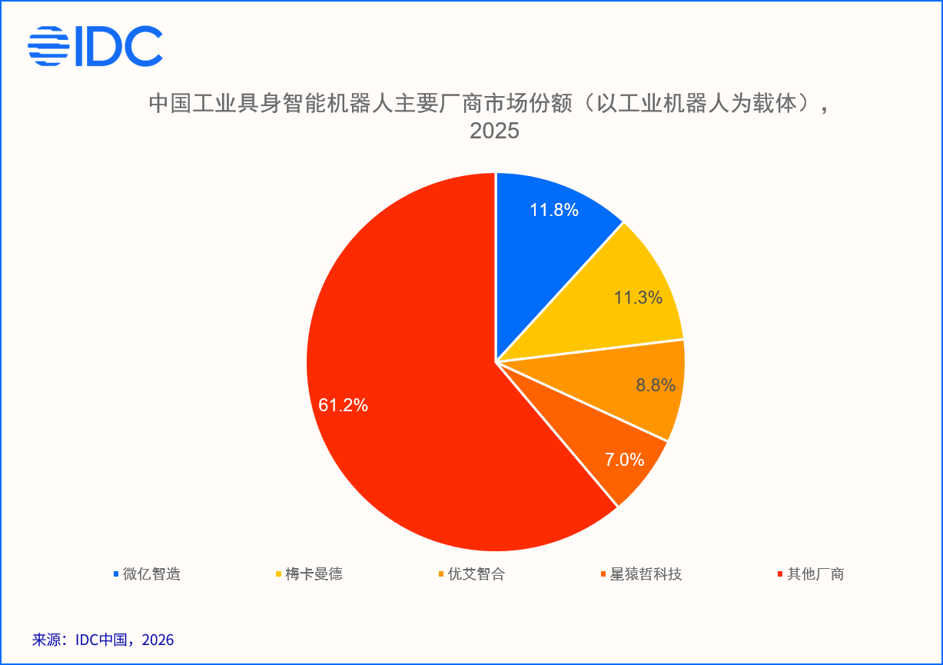
IDC:2025年中国工业具身智能机器人市场达57.4亿元
2026-08-01