

拟人化机器人手提升工业制造效率
维度网讯,美国制造商正在开发拟人化机器人手,以解决传统夹爪在工业制造中的局限性。这些仿生末端执行器模仿人手功能,通过集成传感器和机器学习技术实现灵活抓握与操作,显著提升工业制造效率。传统夹爪如两指、吸盘或钳式设计在处理多样化物体时存在不足,往往需要频繁更换工具,导致工业制造生产线速度降低。拟人化机器人手则能适应不同尺寸、形状和纹理的物体,减少工具切换需求,优化工业制造流程。
拟人化机器人手的关键在于结合强化学习和模仿学习两种机器学习方法,以提升工业制造中的自动化水平。强化学习使拟人化机器人手通过持续反馈优化抓握动作,而模仿学习则通过记录人类运动数据来训练更自然的操作方式。这种双轨学习策略增强了拟人化机器人手在工业制造中的适应性和可靠性。通过集成压力、力和触摸传感器,拟人化机器人手能够实时接收反馈并微调抓握,轻柔处理组件并稳定控制不规则物品,满足工业制造对精度和效率的要求。

随着人工智能系统进步,拟人化机器人手在工业制造中的应用前景广阔。拟人化机器人手能够执行复杂装配任务,精确抓握精细或形状不规则部件,从而加速工业制造生产流程并提高产品质量。这项技术代表了工业制造领域向更高灵活性和智能化发展的重要趋势,为自动化生产线提供了新的解决方案。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
1
美国苹果AI增强Siri公测版亮相 今秋正式发布
2
美国谷歌8月将推出AI图像编辑器Pics,面向商用和教育用户
3
巴西库里蒂巴拟推社会租赁计划,应对8.4万套住房缺口
4
澳大利亚昆士兰州政府启动670万澳元防洪韧性项目
5
美国曼森工程获1290万美元奥克兰港疏浚合同
6
美国建材公司SRM Concrete收购Troy Ready Mix拓展北卡业务
7
韩国建筑工程企业HS Hwaseong获278亿韩元西归浦港整修合同
8
中建中东公司中标迪拜20公里雨水管网项目
9
英国CMAL启动艾伦港疏浚工程为新建渡轮码头做准备
10
中国三部委印发方案:2030年海水淡化规模达450万吨/日
相关视频
原理人尽皆知,精度举国难追,硬核壁垒藏在小数点后!#陀螺仪 #惯性导航 #硬核科普 #精密制造 #工业思维
00:04:16
人类史上最强的一锤!——八万吨锻式液压机!万吨之力,微米之精,工业力量的巅峰!#机械 #液压机 #知识分享 #热门 #制造业
00:02:53
全世界最硬核机器!NASA运输车只算玩具,第一名竟能自我繁殖全世界最硬核的十台巨型机器!NASA运输车只能算玩具,第一名竟然能在百米高空自我繁殖!#世界之最 #top10
00:21:34

今天带你们看一下世界上最大的轮式装载机也是无数重工迷心中的终极梦想,长度超过20米,高度堪比五层楼的钢铁巨兽,小松 WE二三五零。#重工 #机械 #科普
00:04:10

压路机的空心滚筒为啥也能压实地基?3D动画拆解压路机运转逻辑#压路机 #原理 #科普新锐扶持计划 #3D动画 #工地
00:03:27
相关推荐

意大利Italdraghe SGT 200绞吸式挖泥船在圭亚那金矿项目投入运营
2026-07-17
腾势Z9S官图发布,短轴运动轿车续航920公里
2026-07-17

瑞典沃尔沃计划在北美市场重新引入电动轿车和旅行车
2026-07-17

中国小鹏X9空气弹簧质保升级至8年16万公里
2026-07-17
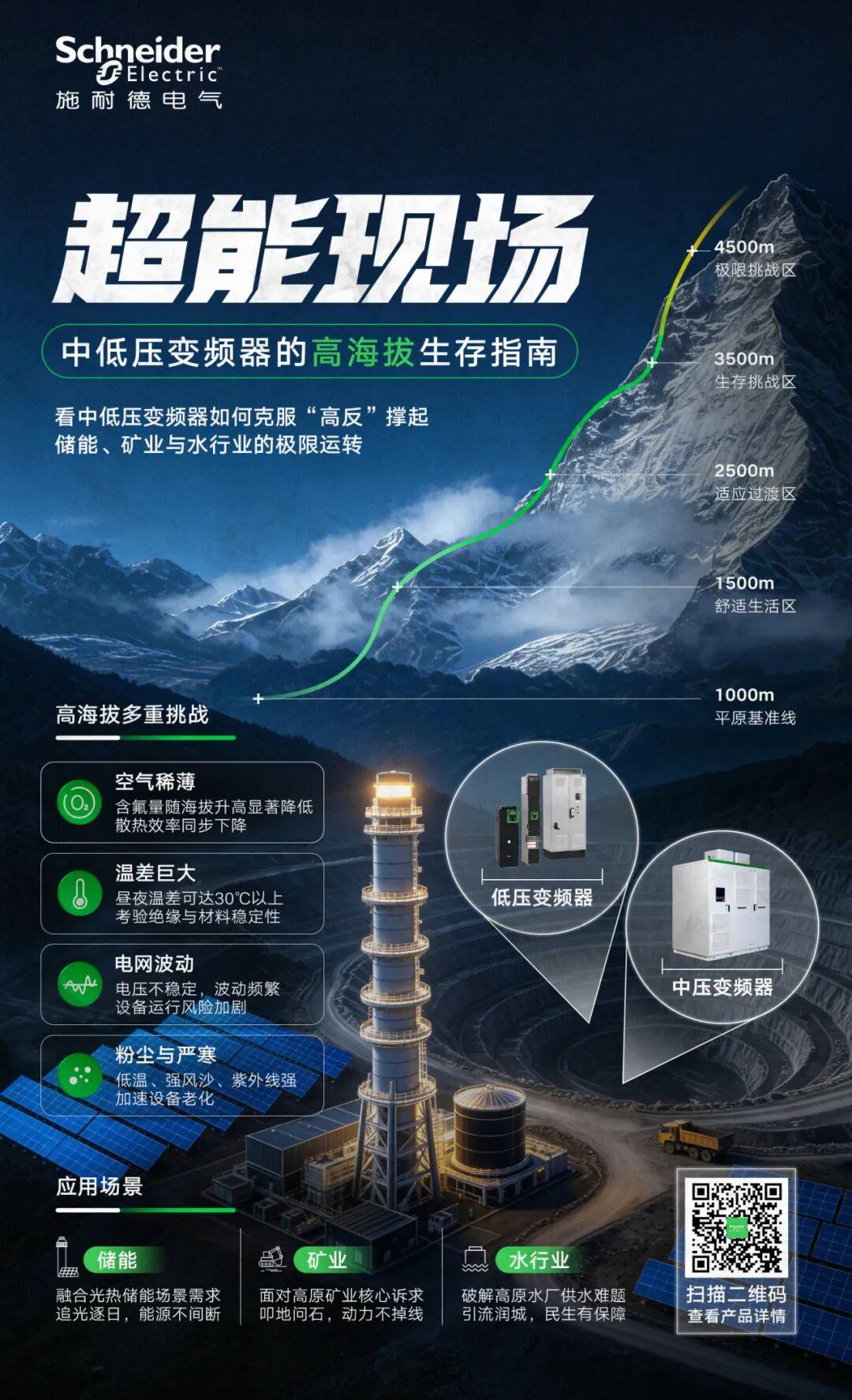
施耐德电气在中国推出高海拔变频器方案覆盖3000-4800米
2026-07-17

德国医疗器械制造商Stryker-Leibinger依托Blum系统实现无人化生产
2026-07-17

中国精雕科技与见真机械签署战略合作协议
2026-07-17
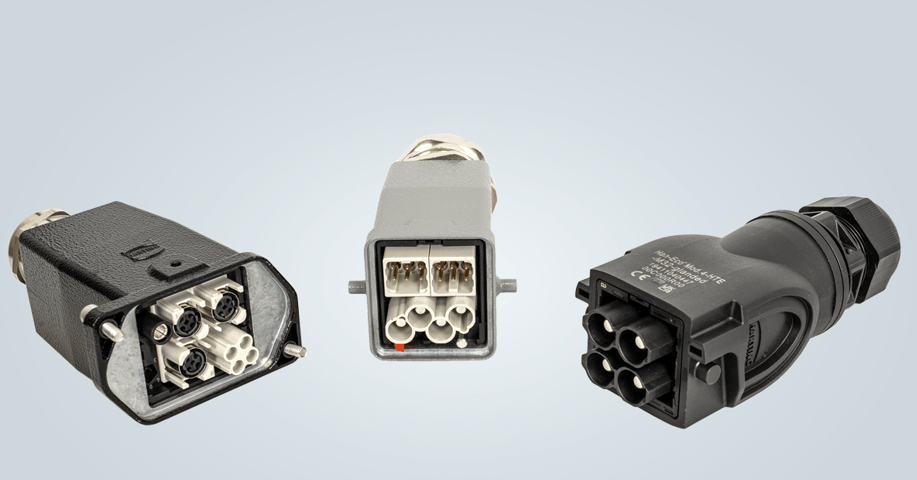
德国浩亭发布Han® 4B系列连接器 面板开孔缩小20%
2026-07-17

挪威电子制造商Kitron中国团队开发自动化FCT平台提升测试效率
2026-07-17
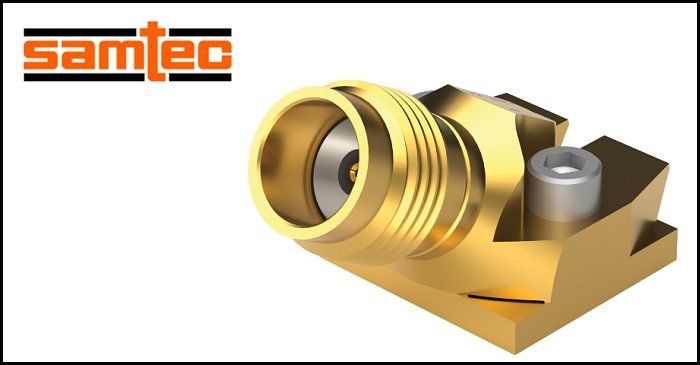
美国电子互联方案商Samtec量产DC-67GHz 1.85mm斜角连接器
2026-07-17