维度网讯,GENISOM AI在奥地利维也纳举办的ICRA 2026上展示了其完整的具身智能生态系统,该系统以GENISOM M1四足机器人为核心,涵盖自研关节执行器模块、MATRiX仿真基础设施、RoamerX自主导航系统及SomaMind AI智能体框架。

ICRA是全球顶尖的机器人与自动化会议之一,汇集了全球研究人员、工程师和行业合作伙伴。对于GENISOM AI来说,维也纳是该公司在该会议上的首次重要展出,其展示的并非单一产品,而是涵盖硬件和软件的全套产品线。展会上,GENISOM AI展示了GENISOM M1、L1、L1-W和L1 EDU机器人平台,以及一个机械臂组件和自研CHAMP关节执行器模块。
此次为与会者提供了亲身体验端到端开发的硬件和软件组件的机会,组件范围从单个执行器到完全自主的机器人系统。
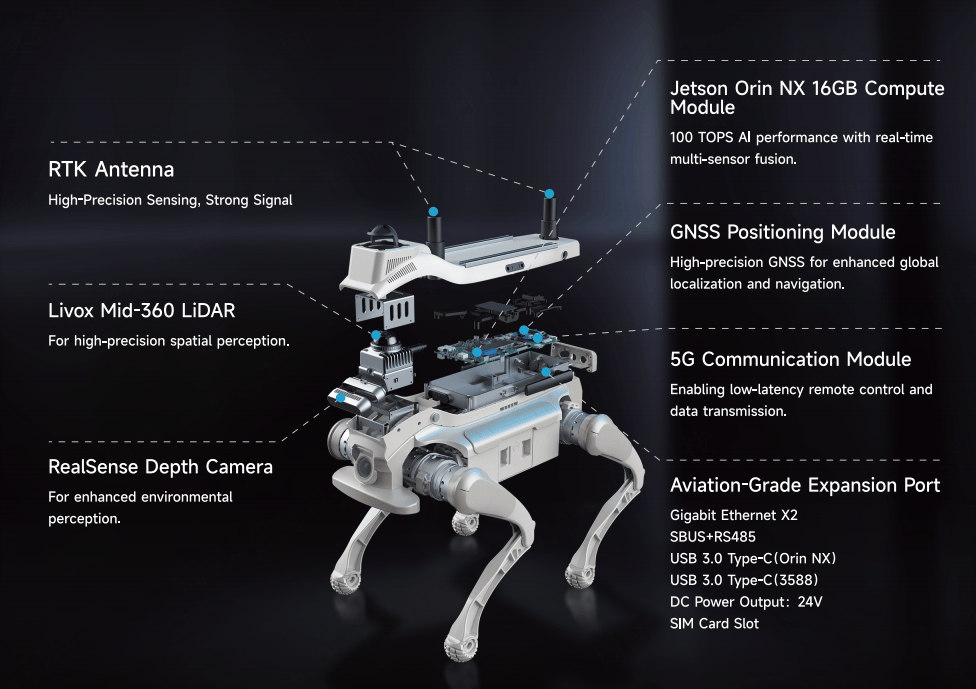
GENISOM M1四足机器人是展会的主要产品亮点。该机器人被定位为业界首款轻型、高负载、全防护四足机器人,实现了1:1的负载自重比,可连续行走负载30公斤。其具备IP67防护等级,能在零下20至55摄氏度的温度范围内运行,最大轮式速度为8米/秒,可越过高达80厘米的障碍物,最大爬坡角度为45度。GENISOM M1由自研的CHAMP P85MAX-S关节执行器模块驱动,峰值扭矩为180牛·米。双热插拔电池在无负载条件下可提供长达五小时的运行时间,15个开放接口支持与外部传感器、电源系统和控制硬件集成。这些规格使其适用于电网巡检、工业设施监控、应急响应、物流和安全巡逻等场景。

在软件层面,GENISOM AI展示了MATRiX仿真平台,这是一个开源的下一代仿真环境,将MuJoCo物理引擎与Unreal Engine 5结合,集成原生ROS2接口,用于多传感器数据流和算法交互。该平台建立在REAL2SIM2REAL数据飞轮之上,支持场景资产(如3D高斯泼溅、生成式高斯场景、点云和网格模型)的无缝复用,可降低硬件试错成本并缩短从仿真到物理部署的时间。开发者可在https://github.com/zsibot/matrix访问MATRiX。RoamerX智能导航平台集成了实时激光雷达、IMU和视觉传感器建图,通过带有漂移补偿的视觉-激光雷达描述子模型实现厘米级定位,并结合时空规划算法在动态环境中生成高效路径,该方案已在仿真和公开的实际演示中得到验证。全身控制框架使四足机械臂机器人能同时跟踪身体速度和末端执行器位姿,该策略通过强化学习和模仿学习在仿真中训练后转移至物理硬件。SomaMind物理与交互智能体系统通过基于行为树的技能编排层连接高级AI推理与物理机器人执行,能将复杂用户指令分解为涵盖导航、感知、操作和通信的原子技能序列,并允许开发者通过在现有机器人能力模块之上编写可复用技能来扩展系统。
GENISOM AI的技术已在电网巡检、安全巡逻、应急救援、物流运输、工业车间监控以及教育和研究项目中得到部署。该公司在四足机器人平台上已实现10000台的制造和交付里程碑。其位于中国苏州的工厂在ISO 9001、ISO 45001和ISO 14001认证的质量管理体系下运行自动化装配线。曼彻斯特大学的一个团队使用GENISOM AI硬件在IROS 2025四足机器人挑战赛(腿式机器人领域最严格的基准测试之一)中获得第一名,验证了机器人系统在压力下的可靠性。

GENISOM AI成立于2023年12月,总部位于北京,是一家全栈具身机器人公司,开发四足和人形机器人平台,同时通过自研关节执行器模块、平台定制、ODM和生产支持、软件工具链以及二次开发资源,支持机器人价值链上的合作伙伴。公司拥有约400名员工,其中约70%致力于研发,在其四足机器人平台上的累计生产和交付已超过10000台,应用涵盖工业巡检、安全巡逻、应急响应以及研究和教育。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com