维度网讯,6月9日,中国智能仓储物流系统集成与自动装卸设备企业因格智能发布Messol-S具身智能装卸机器人,产品面向多规格纸箱、混箱码垛、车厢装卸和工厂末端物流场景,重点解决非标混箱装卸中箱型不一、码垛杂乱、人工强度高和设备适配难等问题。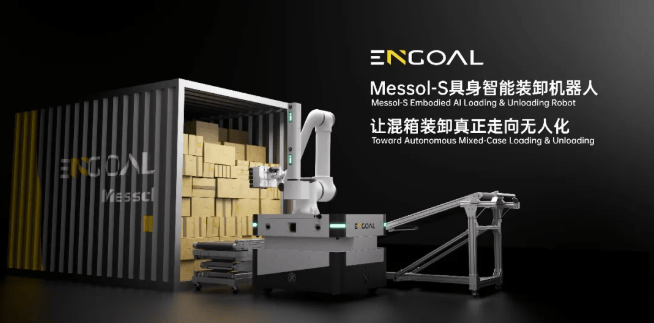
混箱装卸长期是工厂物流自动化中较难处理的环节。相比标准托盘、统一料箱或固定包装规格,混箱场景中的纸箱尺寸、重量、摆放角度和堆叠状态经常变化,车厢内部空间又存在光照不足、通道狭窄、货物遮挡和装卸节奏不稳定等情况。传统自动化设备更适合规则化工况,一旦面对规格不统一、堆放无序的纸箱,就容易出现识别不准、抓取失败、设备停顿和货损增加等问题。Messol-S将产品定位放在这一类真实工况中,试图让单台设备完成纸箱自动装卸全流程。
该机器人搭载双3D视觉系统与SLAM自主导航能力,可识别不同规格纸箱的位置、轮廓和堆叠状态,并在车厢、月台和仓库之间进行自主移动。设备支持多件连续抓取,能够根据现场箱体排列情况调整抓取动作,减少对固定码垛形态的依赖。更小的机身尺寸也使其更容易进入车厢内部作业,适合快消、制造、仓配、零售、电商和第三方物流等存在大量纸箱流转的场景。
这类产品的发布,说明工业物流无人化正在向“最后30米”继续延伸。过去,仓库内部已经出现较多AMR、AGV、输送线、立体库和分拣系统,但车辆到月台、月台到仓内的装卸环节仍大量依赖人工。工人需要在车厢和平台之间反复搬运,劳动强度高,作业效率容易受人员状态、天气、班次和货物结构影响。具身智能装卸机器人进入这一环节后,可以把视觉感知、移动控制、抓取执行和现场调度结合起来,提升末端物流作业的连续性。
对产业链而言,混箱装卸机器人会带动机器视觉、运动控制、机械臂、末端执行器、移动底盘、安全传感器、工业软件和仓储调度系统等环节的需求。产品能否大规模应用,不只取决于单次抓取能力,还取决于复杂现场中的识别稳定性、货损控制、与月台设备的协同、与仓储管理系统的数据连接,以及在不同车型、不同纸箱规格和不同作业节拍下的持续运行能力。
因格智能此前已围绕物料自动卸货、自动存储、自动上线和成品自动出库装车等场景形成解决方案。Messol-S发布后,其产品线进一步覆盖非标混箱装卸这一细分难点。后续节点包括样机在更多行业场景中的测试表现、客户现场部署周期、连续作业效率、故障率和投资回收周期。如果该类机器人能够在复杂混箱现场保持稳定运行,将为制造工厂和仓配中心提供新的自动装卸选择,并推动装卸环节从单点设备改造转向更完整的无人化物流闭环。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com。