维度网讯,理想汽车旗下旗舰车型L9 Livis搭载的自研VLA 2.0辅助驾驶系统,在近日一次包含20项高难度考点的晚高峰城市道路测试中,通过了16项考核,展示了其在复杂路况下的综合处理能力。该测试路线全程50公里,覆盖拥堵路况、极窄小路、复杂盘桥、机非混行等场景,旨在模拟极高难度的日常通勤环境。

理想L9 Livis在此次测试中,成功完成了自主出地库、无保护左转、辅路通行、居民区通行、右转汇入主路并连续变道桥下掉头、机非混行盘桥、河畔小路、潮汐车道、三点掉头、匝道汇入汇出、收费站自主通行、立交桥下环岛、博弈出主路与匝道急弯以及自主进地库等16个项目。其中,车辆在居民区的复杂路况中,面对逆行电动车和临时停靠车辆时,展现出精准的动态路径规划能力。在多选择左转考点中,系统虽无法识别待转区,但凭借合理的路径选择仍被判定通过。自主进出地库的表现尤为突出,系统能够实现城市道路与地库领航的无缝衔接,全程无需人工干预。

测试项目逐项实录

测试路线包含20个高难度考点,每个考点都对应特定的驾驶场景。在自主出地库考点中,车辆需连续通过6个直角弯,全程表现流畅,即便遇到会车也无需多余动作。无保护左转环节,车辆持续向前挪车寻找时机,几乎贴着直行车车尾完成通过。辅路通行主要考察系统对障碍物的识别和纠错能力,本次测试路况友好,车辆顺利驶入辅路。居民区通行时,新款车型近场感知硬件升级为UWB,在杂乱路况中车距把控稳妥,面对横穿行人和逆行车辆均处置到位。

右转汇入主路并连续变道桥下掉头三项动作连贯考核,车辆一气呵成。机非混行盘桥环节,车辆精准捕捉晚高峰车流间隙完成汇流。河畔小路无清晰车道线,车辆在窄路随机会车中灵活借用对向车道避让,盲弯处提前识别对向车辆并减速避险。潮汐车道全程未误入反向车道,控制策略稳妥。三点掉头可直接执行,效率与人工驾驶接近。匝道汇入汇出时路线选择稳健,车辆反复试探空隙后找准时机加速汇出,驾驶逻辑贴近老司机。收费站支持自主选择ETC车道。立交桥下环岛全程谨慎控车,主动防御性减速。博弈出主路与匝道急弯表现优异,车速控制在30km/h以内确保安全。自主进地库环节,车辆实现城市道路与地库领航无缝衔接,自动下坡入库,全程自主处理各类路况。

测试中也有部分项目未能通过,包括封闭园区领航、左转待行区理解以及极窄小路。在园区领航考点评判中,车辆在园区入口前智驾降级,不支持封闭园区自主领航,出口闸机启停逻辑虽贴近人类司机,但受功能暂未OTA更新影响,本项失利。左转待行区理解方面,系统未能识别右转绿灯放行后的起步规则,最终由驾驶员手动完成左转。极窄小路测试中,因车身宽度限制,系统没能规划最优入弯路线,车辆原地停滞,驾驶员只能人工介入接管;后续人工尝试时后轮仍蹭上马路牙子,可见路面极限狭窄。这些未通过的项目,反映出系统在特定边缘场景下的处理仍有提升空间。
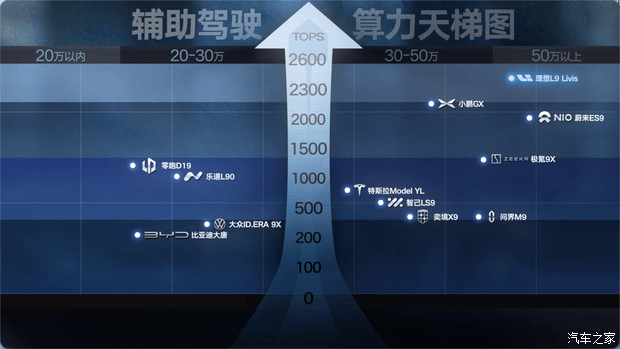
全程统计显示,驾驶员共介入7次,其中安全介入1次、违章介入2次、效率介入4次。作为理想L9 Livis交付即落地的首个VLA(视觉语言行动)大版本,这套智驾系统依托自研的2560TOPS双马赫100芯片运行。在同批次横向实测车型中,该车仅比榜单排名第一的车型多出一次人工介入。测试团队认为,该硬件的潜能尚未完全释放,整套VLA系统在未来仍具备显著的优化空间。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com