

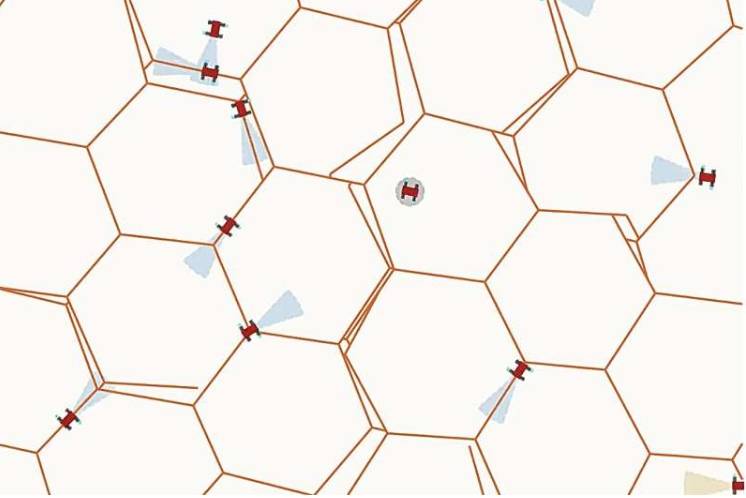
在自然界中,蜜蜂、蚂蚁和白蚁无需蓝图,仅依靠工蚁或雄蜂对温度、建筑材料等信号的反应,通过集体行动构建出宏伟的巢穴,无需中央规划。如今,宾夕法尼亚大学工程学院的研究人员受此启发,开发出数学规则,让虚拟微型机器人群体在计算机模拟中无需遵循任何计划,甚至无需理解计划,就能建造出类似蜂窝的结构,为制造业带来新可能。
机械工程与应用力学副教授、《科学进展》新论文共同资深作者乔丹·雷尼表示,虽然目前的研究只是第一步,但这一新策略可能引领制造业新范式。传统制造,如3D打印,是按精确指令逐步工作,过程脆弱,一个简单错误就可能毁掉整个过程。而新策略制造更稳健,不会因单个机器人犯错而中断施工,且适应性更强,可在现场建造复杂结构。
人类工程学从石器到空间站都依赖规划,先设想最终结果,再分步设计建造,3D打印也不例外。但宾大团队的方法与众不同,避开了这一传统范式。通用机器人、自动化、传感和感知(GRASP)实验室主任Ruzena Bajcsy及论文另一共同资深作者Mark Yim称,该方法没有预先编写的脚本和集中式计划,每个机器人仅对周围环境做出反应。单个机器人无需了解全局,即使部分机器人故障或偏离路线,施工仍可继续。而且所有机器人同时运行,未来整个过程可能更快,对单个机器人故障的承受能力也更强。
研究人员虽受自然启发,但并未精确模仿蜜蜂、蚂蚁等自然界建造者的行为,也未像一些人工智能研究人员那样从大脑中寻找学习算法设计线索。他们关注的是大自然更深层次的原理,即简单行为重复多次可创造出复杂而有用的东西。雷尼称,他们想要一个结构源于行为的系统,机器人遵循正确的本地规则,而非知道自己在建造什么。难点在于确定这些规则,编程让机器人对周围环境做出反应的方法众多,需缩小范围到简单但有用的规则。
团队集中精力解决几个基本问题,如机器人撞到其他机器人建造的物体时的反应、转向角度、行走距离等,产生了十几个变量。研究人员在多次模拟过程中研究这些变量,通过模拟机器人活动微调重要规则。最终发现,系统中无序程度对最终结构影响至关重要,改变的参数越多,最终结构变化越大。在蜂窝状结构中添加适量无序结构可增强其韧性,团队找到了改变最终成品几何形状从而影响其抗裂性能的“杠杆”。
虽然团队已制作出原型,但距离打造真正的机器人集群还有距离。他们计划先更新模拟系统,以更好反映微型机器人在现实世界中的运作方式。早期模型设想机器人像迷你3D打印机一样以直线铺设材料,但或许电化学方法让机器人在自身周围生长金属结构更实用。要实现这一目标,需在制造能移动、感知和与材料互动的微型机器人方面取得进展。不过,团队认为这一概念本身代表了重要进步,希望借此让人们以新方式思考万物构建方式,学习大自然从无数细微行动汇聚成宏大景象的方式。
其他合著者包括共同第一作者Jiakun Lu和Xiaoheng Zhu,以及Walker Gosrich,他们均来自宾夕法尼亚大学工程学院。