

《先进智能系统》杂志发表的一项研究引发高端设备制造与神经科学领域关注:大脑能够适应人工第三只手臂,并借助其完成简单任务,这为精密机械师、外科医生等希望未来人们能熟练运用“第三只手臂”的梦想带来新曙光。
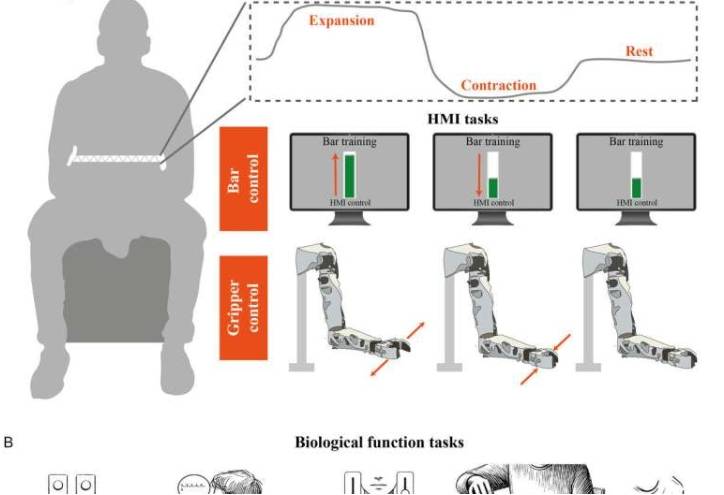
在此次研究中,约20名参与者于实验室环境学习使用假肢。这根未完成的假肢末端装有夹子,固定在参与者身旁桌子上,参与者坐着时,通过放置在横膈膜上的皮带控制假肢,呼气时假肢前移,吸气时后移。参与者需练习执行抓取积木、按下按钮、移动光标等一系列任务,科学家旨在借此确定大脑学习使用机械肢体达到自然手臂程度的水平。
此前,EPFL团队已证明参与者能控制虚拟手臂,并用简单机械臂指向物体,此次研究则更进一步,测试了抓握能力。由博士后大卫·利尔领导的团队着重测量了泛化任务这一复杂技能。研究主要作者西尔维斯特罗·米塞拉解释,自然肢体可自动完成泛化任务,大脑会内化动作序列原理并泛化到其他物体。
研究结果显示,泛化现象确实存在。参与者先练习同时用自然手臂和机械臂快速移动积木,在第二阶段,相比缺乏练习者,他们能更快、更精确地用自然手臂和机械臂操纵各类其他物体,表明自然肢体诱导泛化的有效协议对机器人肢体同样有效。
不过,当测试阶段操作与训练阶段差异过大时,泛化能力会下降,在多任务环境中尤为明显。例如参与者同时用键盘打字时,就难以泛化用假肢抓取物体的能力。米塞拉认为,这表明假肢泛化可能更困难,或许仅适用于执行相似任务,且训练方式可能并非最佳。
目前,研究用机械肢体增强人体功能的科学家较少,美国和欧洲仅有少数团队涉足,包括整合人工手指研究,但该方法潜力巨大。米塞拉称,很多职业如急救员、精密机械师、外科医生等都可能需要额外肢体,但此类应用距离现实尚远。
主要障碍在于控制力不足。即便改进,人造手臂的横膈膜控制仍处于初级阶段,远不及自然肢体精确。为克服此障碍,皮层电极等侵入式接口或将成为将脑信号转化为手臂可执行指令的长期方案,但目前难以实现。因此,米塞拉团队目前仅使用非侵入式设备,当前通过呼吸控制,不久将通过放置在头皮上的电极控制。
对于米塞拉而言,这类工作的魅力不在于增强人类的未来场景,而在于更好地理解大脑及其与身体交互、建立新连接的方式。他表示,通过改善和加快假肢训练,或许能为中风后瘫痪患者的康复治疗等提供有益见解。
更多信息: Daniel Leal Pinheiro 等,《探索利用额外机械臂进行运动增强的技能泛化》,《先进智能系统》(2025)。