

密歇根大学研究团队开发出全球首个赋予类人机器人完全自主观察、决策与移动能力的AI模型"LEGO-H"。该成果发表于arXiv预印本服务器,并将亮相2025年6月IEEE计算机视觉与模式识别会议,为救援机器人、生态监测设备等高端装备的智能化升级开辟新路径。
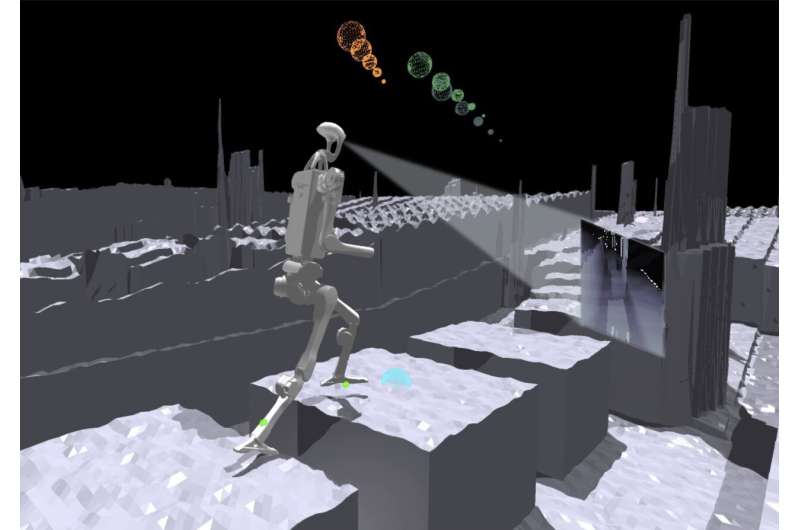
传统机器人依赖预设地图与人工干预的导航模式面临重大突破。研究团队通过统一高级路径规划与低级运动控制,使配备摄像头的Unitree Robotics人形机器人实现"感知-决策-行动"闭环:在模拟环境中,1.8米成人身高与1.2米儿童身高的虚拟机器人,仅凭视觉输入、基础身体感知及"东北方向0.3英里"等模糊指令,即可自主穿越五种地形、五个难度等级的路径,其效率与安全性甚至超越预先获取完美环境信息的对照组。
"关键创新在于赋予机器人环境自适应能力。"项目负责人Stella Yu教授指出,通过消除预编程动作模式,机器人展现出惊人的环境交互智慧:能侧身挤过狭窄通道、跨过低矮障碍或绕行高耸物体,更首次实现跌倒后自主恢复平衡。"这些行为均非人为编程,而是通过强化学习自然涌现的智能表现。"
研究团队采用渐进式技术路线:首阶段聚焦下肢运动控制,通过身体感知模块有效降低损伤风险;当前正攻关全身协调算法,计划释放机器人全部自由度以提升运动稳定性。计算机科学与工程研究员Kwan-Yee Lin透露,下一步将把虚拟验证成果迁移至物理机器人,重点攻克传感器融合、实时决策等工程化挑战。
这项突破标志着高端服务机器人从"预设程序执行"向"环境智能交互"的范式转变。随着全身动态控制技术的完善,未来类人机器人有望在灾害救援、深海探测、极地科考等极端环境中,展现更强大的自主作业能力,为高端装备制造业注入新的增长动能。
更多信息: Kwan-Yee Lin 等,《让类人机器人徒步!复杂路径上的综合技能发展》,arXiv (2025)。