

为让机器人可靠完成家务、组装产品等体力劳动,需像人类一样利用触觉获取信息调整操作策略。目前多数机器人手和抓手依赖视觉触觉传感器,用小型摄像头捕捉图像与接触表面变形,但这些传感器需坚硬材料确保图像质量,降低了机器人灵活性,难以处理易碎和形状不规则物体。
浙江大学研究人员推出新型机器人手FlexiRay,在《自然通讯》杂志发表相关论文。该机械手基于柔性结构,受挤压时自然向内弯曲产生变形模式,再经深度学习算法分析。“这项研究灵感源于人类手将柔软皮肤与复杂感觉系统结合的能力。”论文资深作者董慧旭表示,软体机器人系统在结构顺应性上有进步,但集成高分辨率传感技术是挑战,此次主要目标是解决软体传感器“盲区”问题。
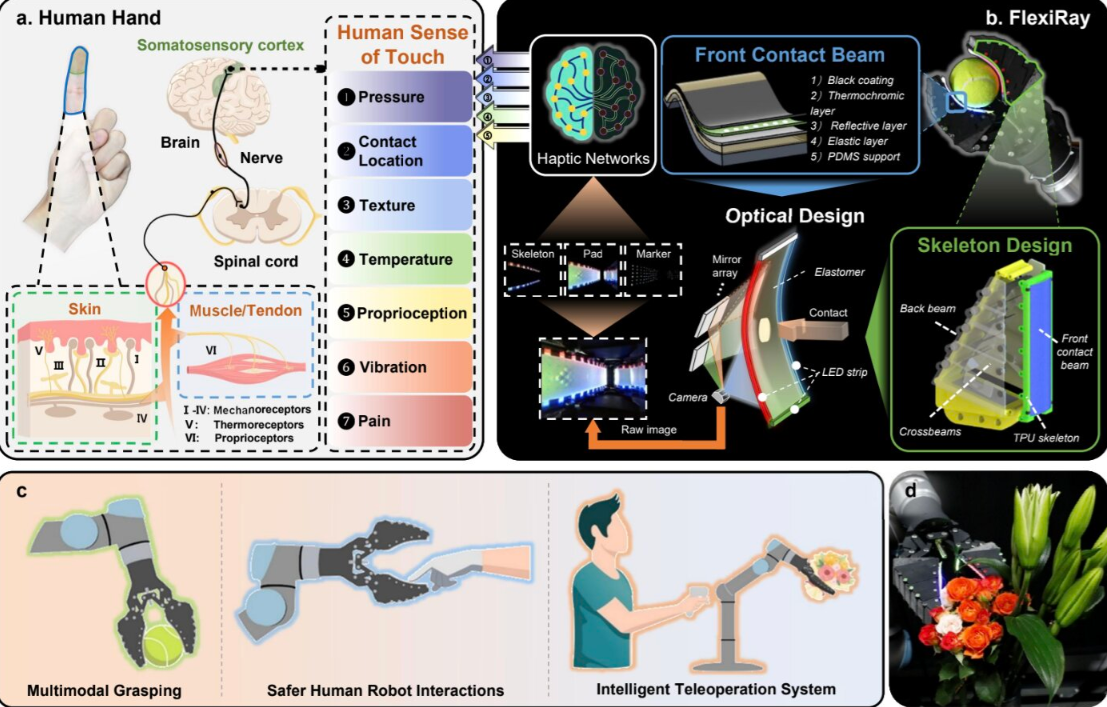
FlexiRay是柔性机械手指,能“感知”触及物体。它基于鳍状射线效应的仿生结构,像鱼鳍一样包裹物体,利用内置摄像头和独特“多镜面”光学系统工作。当软体机器人手指弯曲遮挡内部摄像头视野时,其独特内部光学结构能根据手指被动形变动态调整视野,实现“绕过”拐角,包裹不规则物体同时保持连续无遮挡视野。
FlexiRay优势明显,即便用柔韧材料制成,也能可靠采集视觉和触觉信息。仅一台摄像头,就能精确检测施加的力、自身形状、接触位置、物体纹理和温度。初步测试中,大变形下有效感知覆盖率超90%,实现了从“避免变形”到“利用变形”的范式转变。
新机械手成果瞩目,凸显操控精密物体和工具潜力。未来有望进一步改进或与其他组件集成,构建定制系统。董慧旭称,FlexiRay能贴合物体形状,实现巨大有效传感面积,复制五种类似人类感觉。未来还计划将其扩展到全多指机器人手,与模仿学习框架结合,让机器人从人类演示中学习。
出版详情:作者:Yanzhe Wang等人,标题:《柔性机器人手利用大变形实现全覆盖类人多模态触觉感知》,发表于:《自然通讯》(2025)。期刊信息:《自然通讯》