

小米机器人在中国汽车工厂完成自攻螺母安装测试
小米机器人(Xiaomi Robotics)近期在中国某汽车制造工厂的自攻螺母上件工站进行了实际应用测试。该测试中,机器人连续自主运行3小时,实现了双侧同时安装自攻螺母,成功率达到了90.2%,并满足了产线最快76秒的生产节拍要求。这标志着小米机器人在从实验室研发向工业场景部署方面迈出了关键一步。
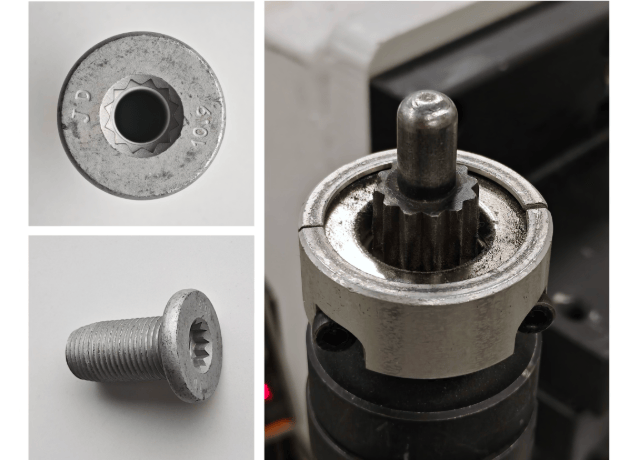
在汽车工厂的测试中,小米机器人展示了其处理复杂装配任务的能力。它需要从自动送钉设备中抓取自攻螺母,并将其精确放置到定位工装上,配合滑台输送和自动定位锁定,完成汽车一体化压铸后地板零件的自动化拧紧作业。自攻螺母内侧的花键结构、抓取姿态的不固定性以及定位销轴的磁吸力影响,都增加了装配的难度。
小米机器人的技术实现基于其VLA大模型Xiaomi-Robotics-0,结合了端到端数据驱动控制和强化学习。这种方法使机器人能够快速适应不同工况,并从实际交互中持续学习,提升作业稳定性。多模态感知系统融合了视觉、触觉和关节本体信息,以降低状态误判概率。全身运动控制则采用了优化控制与强化学习的混合架构,确保机器人在干扰条件下保持平衡。
尽管取得了进展,测试中也遇到了一些典型失效案例,如花键贴合不紧密或姿态调整卡滞,这突显了精准对位的挑战。小米机器人还在其他工站如料箱搬运和前徽标安装进行了试点部署,相关工作正在推进中。该公司已开源相关技术资源,包括TacRefineNet触觉模型和Xiaomi-Robotics-0项目,以促进具身智能领域的发展。
这次汽车工厂的测试验证了小米机器人在实际生产环境中的性能,为未来在制造业的规模化应用奠定了基础。通过不断优化生产节拍和合格率,小米机器人有望在更多工业场景中发挥作用。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
相关视频

沉浸式观光新体验!西安海市蜃楼观光车惊艳启程
00:01:02
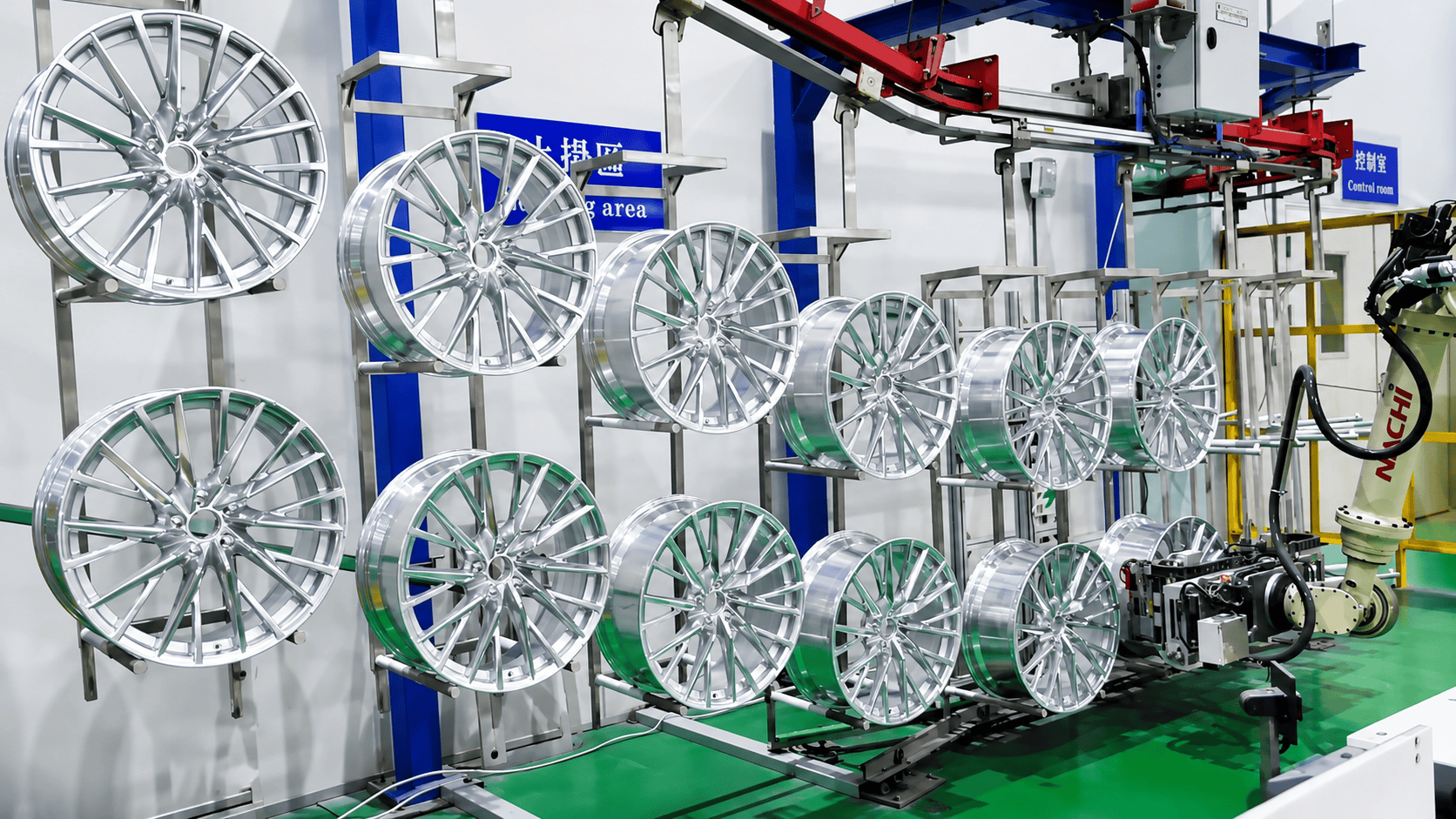
铝合金轮毂锻造工艺#轮毂生产制造 #汽车轮毂制造生产线 #轮毂
00:07:39

浓烟、高温、密闭空间!地下电缆隧道着火怎么办?国家电网 派出“钢铁汪汪队”——#电力巡检机器狗侦查火情,#穿梭无人机 确认起火点,#消防灭火机器人 精准处置。#汪汪队立大功 ,火情风险退退退!
00:00:16

一车三形态!解密能载 60 吨设备的动力舟桥,这才是机械之美#动力舟桥 #机械设备 #救援机械 #中国安能搭建应急动力舟桥
00:02:57
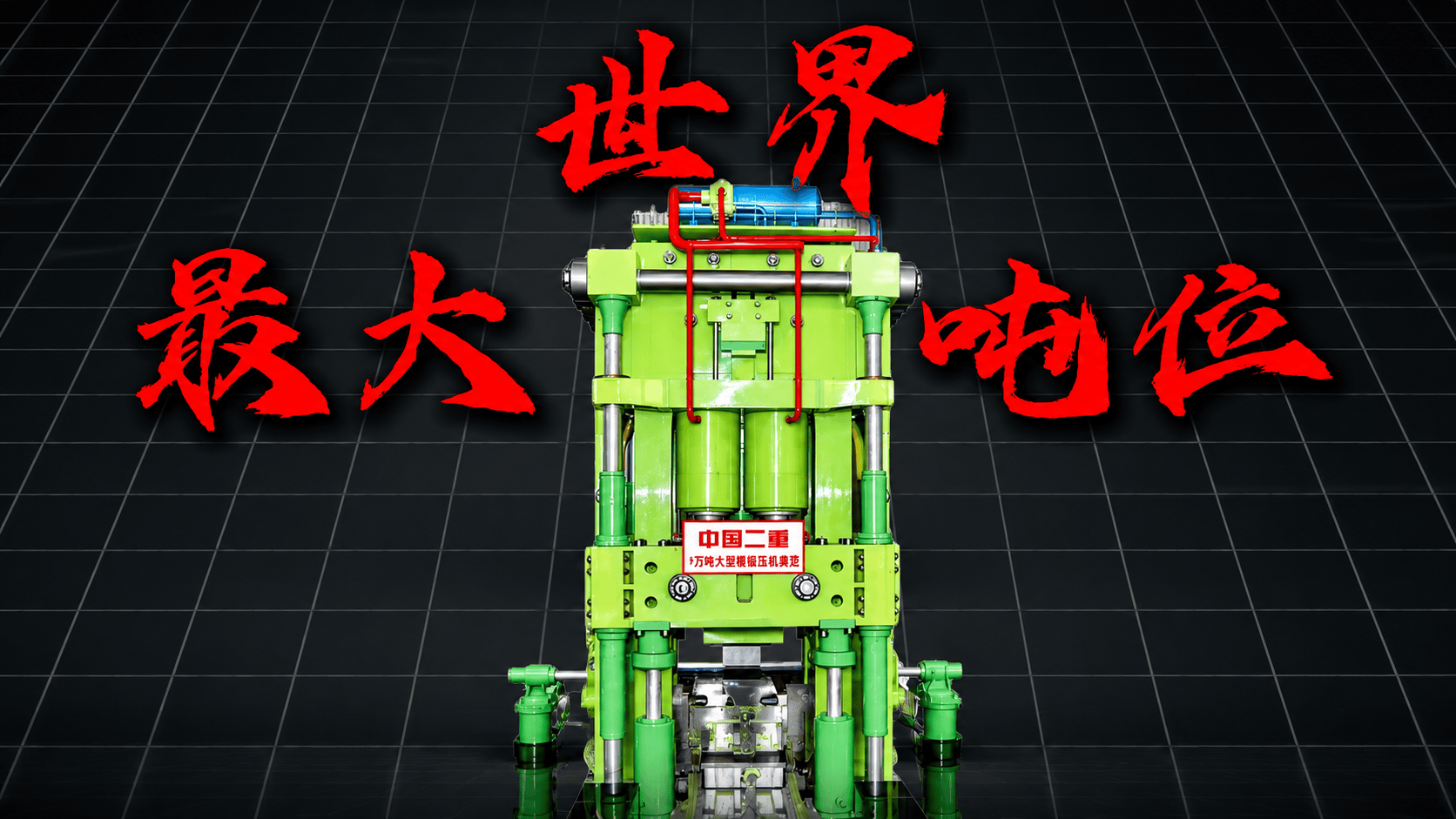
人类史上最强的一锤!——八万吨锻式液压机!万吨之力,微米之精,工业力量的巅峰!#机械 #液压机 #知识分享 #热门 #制造业
00:02:53
相关推荐

日本小松收购德国地下采矿设备制造商GHH加码巴西地下采矿市场
2026-07-18

中国招商轮船拟投49.3亿元新建6艘VLOC矿砂船
2026-07-18

意大利Italdraghe SGT 200绞吸式挖泥船在圭亚那金矿项目投入运营
2026-07-17
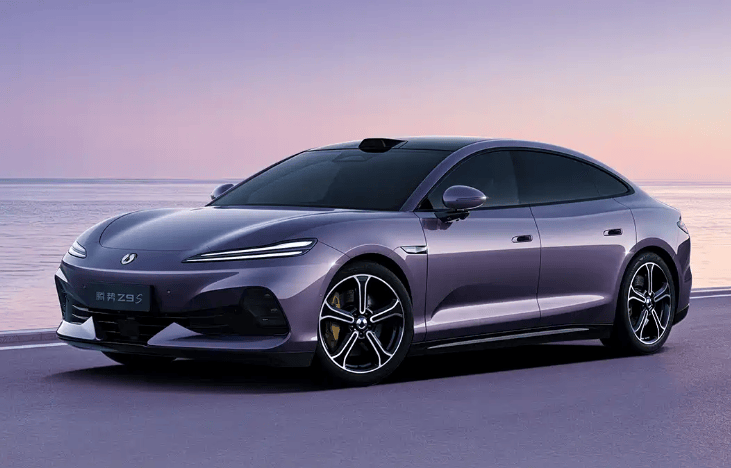
腾势Z9S官图发布,短轴运动轿车续航920公里
2026-07-17

瑞典沃尔沃计划在北美市场重新引入电动轿车和旅行车
2026-07-17

中国小鹏X9空气弹簧质保升级至8年16万公里
2026-07-17
施耐德电气在中国推出高海拔变频器方案覆盖3000-4800米
2026-07-17

德国医疗器械制造商Stryker-Leibinger依托Blum系统实现无人化生产
2026-07-17

中国精雕科技与见真机械签署战略合作协议
2026-07-17
德国浩亭发布Han® 4B系列连接器 面板开孔缩小20%
2026-07-17