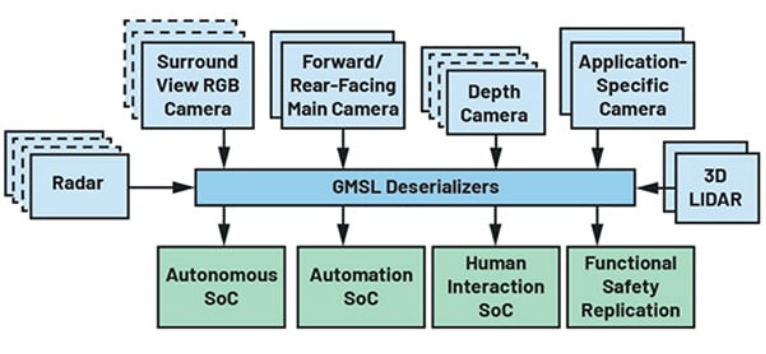
维度网讯,机器人视觉系统需在极短时间内完成多路图像采集、传输、处理与动作响应。相机数量增加后,带宽、同步、布线和延迟均成为设计瓶颈。美国Analog Devices公司开发的GMSL即千兆多媒体串行链路,是一种高速串行解串SerDes通信技术,通过单根同轴线或屏蔽双绞线连接远端相机与中央计算模块,为机器人系统提供高带宽、低延迟和时序可预测的多相机数据传输方案。
G
GMSL最初大量部署于汽车ADAS场景,用于连接车身不同位置的摄像头与处理器。当前机器人视觉面临同类问题:相机数量持续增加、安装位置日益分散、主处理器集中于计算模块内部。若继续依赖短距板级MIPI连接,传感器与处理器之间的物理布局受限;若采用通用网络方案,则需应对协议栈、交换、路由和数据包调度带来的复杂度。GMSL的价值在于让远端相机通过专用点对点高速链路接入中央计算模块,减少线缆的同时维持低延迟与稳定时序。
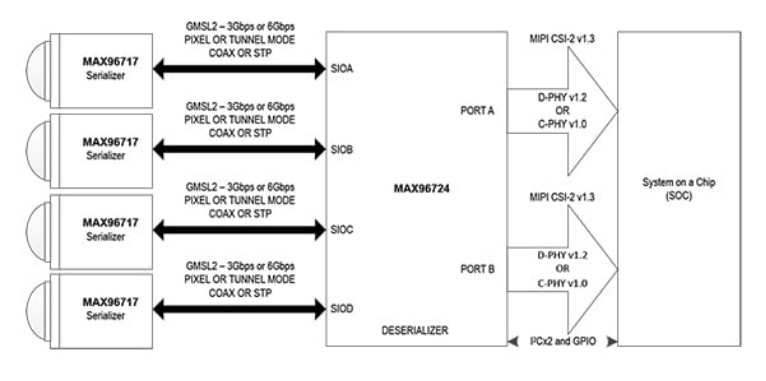
在典型GMSL2机器人视觉系统中,相机端部署串行器,处理器端部署解串器。ADI MAX96717 GMSL2串行器置于相机端,接收MIPI CSI-2数据并通过GMSL2链路输出,支持3Gbps或6Gbps前向链路、187.5Mbps反向控制通道及最高4路MIPI CSI-2输入。ADI MAX96724多路GMSL2解串器可接收最多4路远端传感器输入,每条链路支持3Gbps或6Gbps固定速率,转换为1路、2路或4路MIPI D-PHY或C-PHY输出给主处理器。由于链路时序稳定,多相机数据更易与激光雷达、IMU等其他传感器数据融合。
GMSL与国际标准MIPI CSI-2、工业以太网视觉方案的定位差异清晰。MIPI CSI-2用于图像传感器与处理器间短距连接,接口简单高效但传输距离与布线灵活性有限。工业以太网视觉方案适合大范围网络化连接,但引入协议栈、交换与数据包调度后,系统同步与延迟控制更复杂。GMSL强调确定性点对点传输,每台相机使用独立高速链路,无需共享网络带宽或经过数据包调度,相机数量增加时可通过串行器和解串器扩展链路,带宽与时序更可预测。选型仍需结合传输距离、线缆、处理器接口、生态与量产要求综合判断。
多相机系统在机器人导航、避障、操控、定位与实时场景理解中,需同时处理多视角数据。以1080p 30fps 24bit相机为例,单路视频数据约1.4Gbps,四路相机合计约5.6Gbps,六路相机约8.4Gbps,分辨率与帧率提升后带宽需求将进入数十Gbps级别。GMSL采用确定性低延迟链路,有助于保持多路相机同步,让开发者不必为网络争抢、路由和数据包抖动额外设计复杂处理逻辑。
机器人系统设计需提前做好链路与接口规划。带宽预算需确认串行器、解串器与处理器接口留有充足余量。机器人内部空间紧凑,线缆走向、弯折、抗干扰与装配可靠性影响系统稳定性。多相机感知、传感器融合与运动控制需稳定时间基准,设计时需确认同步机制。高速链路在电机、驱动器和电源模块附近运行时,需处理噪声、接地与屏蔽问题。解串后MIPI输出需与主处理器摄像头接口、带宽和软件驱动匹配。
GMSL技术已历多代演进。GMSL1主要用于车载摄像头与显示等高速视频传输,典型器件串行速率可达3.12Gbps。GMSL2将链路速率提升至3Gbps与6Gbps,增强多相机同步与远端传感器连接能力。GMSL3进一步将链路速率提升至12Gbps,面向更高分辨率传感器与更复杂的多传感器系统。开发者仍需根据具体串行器与解串器数据手册确认兼容性、带宽余量、线缆要求与输出接口。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com