维度网讯,轻量化结构被视为提升资源效率与气候保护的核心技术。纤维增强塑料在保持同等性能的前提下,能够较钢材与铝材显著降低重量,从而减少交通运输的温室气体排放。然而,模具依赖及小批量生产的成本瓶颈限制了其工业推广,中小企业仍普遍采用手糊成型等手工工艺,操作人员经验对部件质量影响较大,且织物半成品通常产生高达30%的材料废料。
为突破上述局限,3D打印作为无模具制造手段,可带来与批量无关的单件成本、近净成形和稳定的部件质量。连续纤维的引入大幅提升了强度,但现有基于龙门架构的商用系统将纤维局限于平面层内,材料性能呈各向异性;纤维增强热固性树脂的打印多停留在实验室阶段,未能充分释放轻量化潜力。亚琛工业大学纺织技术研究所(ITA)正推进机器人导引的连续纤维3D打印工艺,利用机械臂在三维空间沿载荷路径铺放纤维,实现拓扑优化结构,兼顾高强度和材料效率。打印头、半成品及工艺控制系统分别针对热塑性体系和紫外光(UV)固化树脂进行开发。
聚酰胺6等热塑性塑料已广泛用于交通部件,连续纤维预浸渍半成品的制造与加工是该方向的研究重点。由于热塑性熔体黏度高,纤维浸渍和打印头中的熔融行为构成双重难题,传统抽丝方法难以适用。ITA为此探索创新的纤维涂层,以求在良好浸渍的同时维持可控刚度。另一路径聚焦UV固化树脂,其低黏度和快速固化特性有利于纤维浸渍,并可免去耗能的后固化流程。但现有纤维输送方案或导致尺寸偏差,或对树脂黏度提出苛刻要求。ITA开发了将纤维输送与树脂流动解耦的新方法,可适应多种UV树脂并精准控制纤维体积分数,相应的打印头、树脂配方和纤维半成品也正同步定制。
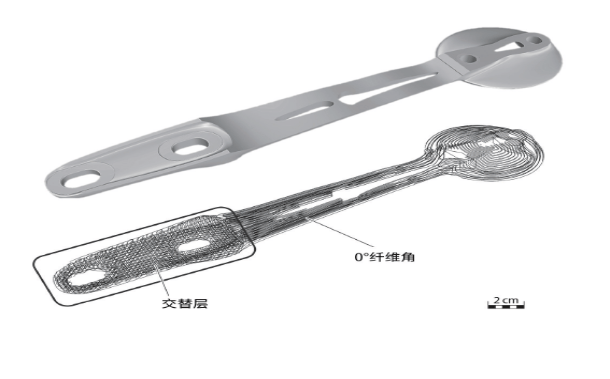
以自行车把手上的电脑支架为例,基于几何边界和载荷工况,团队推导出力学要求并进行拓扑优化,形成类桁架结构。在仿真验证后,根据应力矢量规划纤维铺放路径,夹紧区域采用准各向同性层压板,桁架单元则以纵向纤维取向承受轴向力。建模软件在非平面层中规划纤维路径,通过数控转换生成机器人运动代码,并加入纤维输送和切断指令。优化后的支架下部结构表明,连续纤维料带的沉积直接构建了部件几何形状。
初步试验证实,机器人导引的连续纤维3D打印在轻量化领域具备潜力,该无模具工艺为纤维增强复合材料生产提供了新路径,尤其适用于小批量和高度定制化部件的经济、可持续制造。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com