维度网讯,Waymo与代尔夫特理工大学(TU Delft)联合研发的人类避撞参考模型ReD(Reference Driver)日前发表在《自然·通讯》(Nature Communications)期刊上,该模型基于主动推理框架(active inference framework)模拟人类驾驶员的避撞行为,为自动驾驶系统提供了一个谨慎且能干的人类驾驶员行为基准。
ReD模型的核心思想是将人类驾驶行为理解为对“惊奇”(surprise)的最小化。与专注于模拟人类何时对威胁做出反应的既有NIEON(Non-Impaired driver with Eyes ON the conflict)模型不同,ReD可模拟完整的闭环认知过程,包括驾驶员在情境演变中如何更新信念、管理对其他道路使用者意图的不确定性,并选择刹车、转向或两者结合的规避动作。该模型基于与NIEON及早期主动推理模型相同的预测处理框架,确保了方法上的连续性。
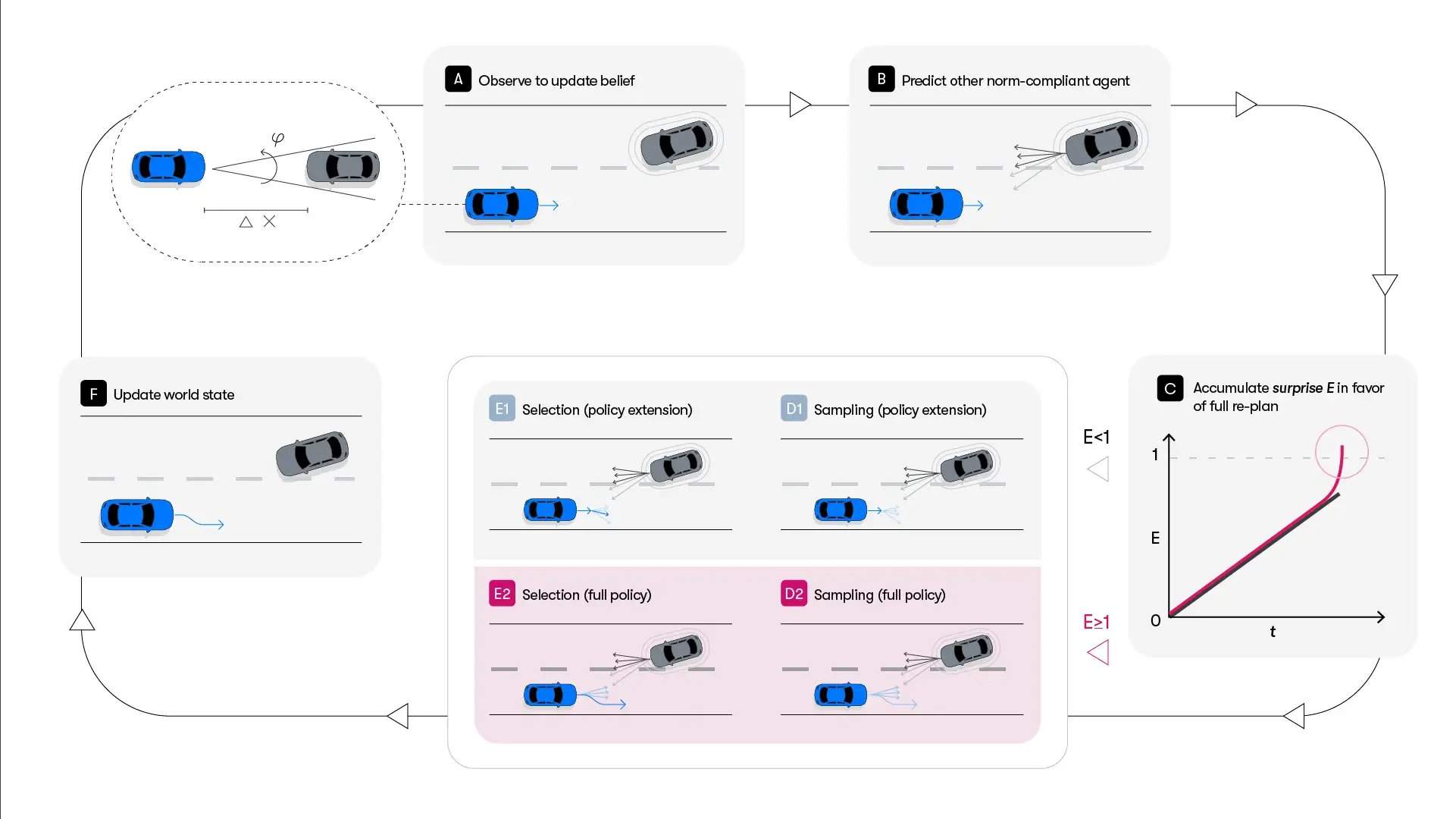
代尔夫特理工大学助理教授Arkady Zgonnikov表示,通过将模型建立在主动推理基础上,团队实现了对人类碰撞反应的整体表征,能够模拟驾驶员在冲突期间感受到的内部“惊奇”,为自动驾驶系统提供了一个更类似人类的基准。该研究得到主动推理创始人、神经科学家Karl Friston教授的认可,他评价该工作“正是主动推理的初衷”,在生成建模和场景考虑方面堪称杰作,展示了多重约束满足的重要性。
ReD模型具有可扩展性,可模拟除避撞之外的广泛道路使用者行为,如自适应驾驶员行为和道路使用者交互。该模型不需要手动编码规则和人工注释,而是完全自动化,可应用于包含数千个场景的大型测试集,在虚拟环境中表示和评估众多复杂的真实碰撞。Waymo首席安全官Mauricio Pena指出,理解人类如何处理冲突是评估自动驾驶汽车安全的关键拼图,ReD模型可帮助行业走向一种共享的、基于科学的避撞行为评估方法。
Waymo已表示将在学术许可下开放该主动推理模型的研究代码,用于研究、教学、个人实验和科学出版,并正与研究人员、监管机构以及国际自动机工程师学会(SAE)等标准组织就驾驶行为参考模型的应用达成共识。此外,Waymo近期还发起了名为“Because”的全国性活动,邀请公众参与关于驾驶未来的对话,并分享了部分员工的个人故事,阐述他们推动自动驾驶技术发展的动机。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com