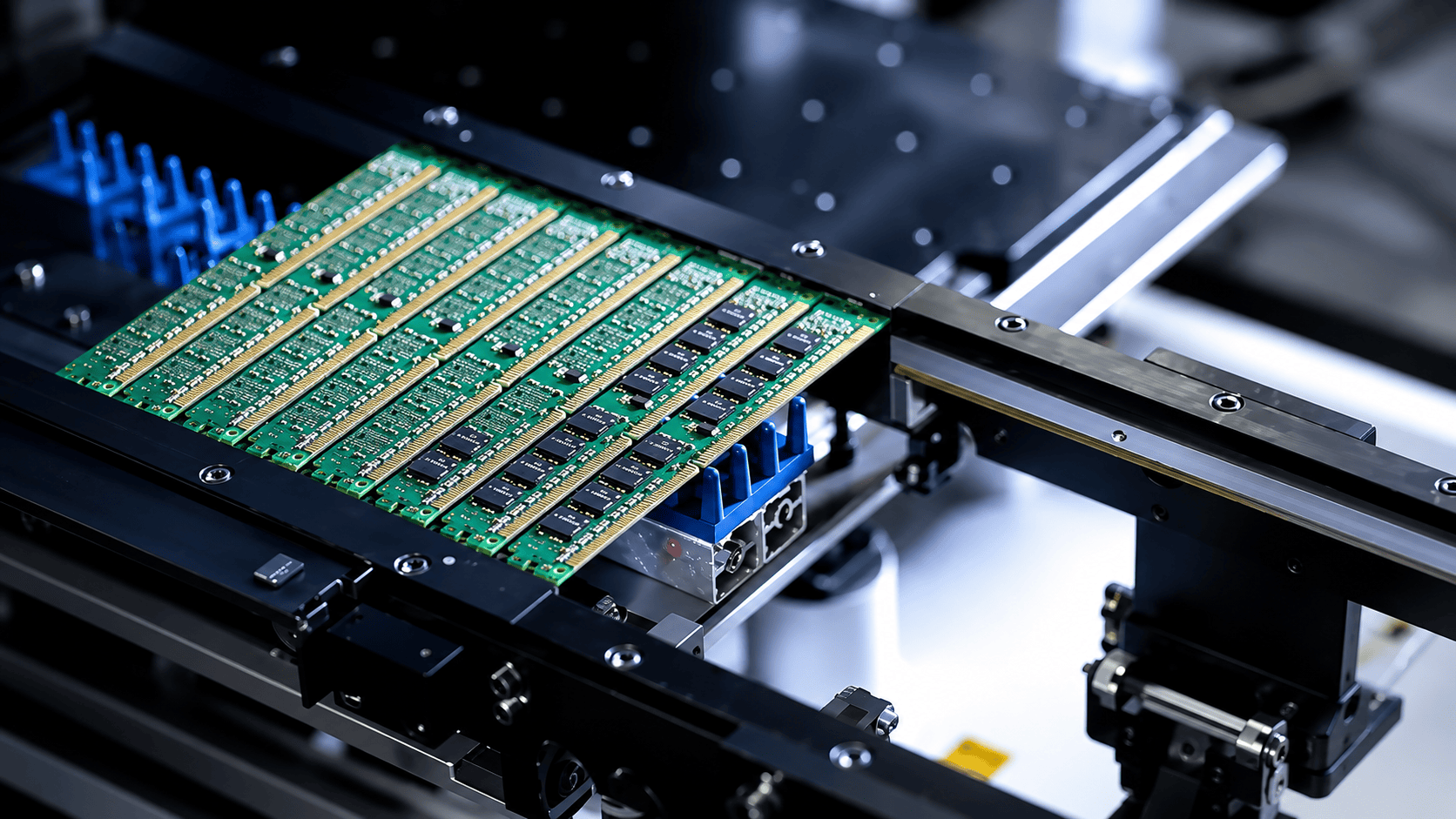
高带宽内存技术正迈向16层堆叠的量产前夜,在CES 2026上,SK海力士展出全球首款16层高带宽内存4样品,单堆栈容量达48GB。然而,层数提升带来制造难度激增,贴装精度、焊点间距等原本被工艺余量掩盖的问题,在16层高度下被放大至“生死线”级别。

面对挑战,行业分化出两种路径:追求终极革命的混合键合与基于现实的改良方案。混合键合通过金属层与介质层同步键合,实现更小互连间距、更高I/O密度,被视为终极方向。但JEDEC组织放宽高带宽内存模块高度上限至775µm,为16层高带宽内存沿用传统微凸点技术腾出空间,让Fluxless(无助焊剂)技术成为过渡焦点。
Fluxless技术旨在不推翻既有TCB(热压键合)体系的前提下,解决助焊剂残留与清洗成本问题,成为16层高带宽内存量产的关键。ASMPT通过等离子体活化(AOR)替代化学助焊剂,Besi则倾向于甲酸和氢基还原,均展示了在12~16层范围内实现Fluxless TCB的能力。然而,SK海力士评估后认为Fluxless技术“还早”,将继续沿用Advanced MR-MUF工艺,凸显量产落地的现实挑战。
设备商在高带宽内存4 16层标准高度放宽后,分野明显。BESI作为混合键合的“终局信仰者”,提前打磨节拍、精度与平台化能力,却面临短期订单震荡;ASMPT则成为TCB的“现实主义进化派”,推动Fluxless方向,强调良率、节拍与可靠性,2025年下半年连续获得TCB设备大单,预计2027年TCB市场规模将超10亿美元,目标占据35%~40%份额。韩美半导体与韩华精密机械作为SK海力士核心设备供应商,分别通过Dual TC Bonder与多点布局策略,试图在16层高带宽内存时代巩固地位,而K&S则凭借高稳定性、大规模制造经验,成为产线不可缺的“基础设施”。
Fluxless的延期并非技术失败,而是工业现实的写照。SK海力士选择Advanced MR-MUF,凸显“更稳方案”在高带宽内存4时代的重要性。混合键合虽为绕不开的高山,但更可能以渐进、混合、折中的方式渗透,先进封装战争中,技术进化需通过量产审判。