

在没有可靠全球定位系统 (GPS) 信号的环境中导航无人机仍然是现代航空航天技术面临的重大挑战。一项新研究探讨了在 GPS 信号缺失区域无人机 (UAV) 的定位方法,探索了绝对定位和相对定位技术。
这项研究强调了基于视觉的系统的潜力,以及集成各种传感器和算法的混合方法的重要性。这项工作不仅增强了我们对无人机在复杂地形中导航的理解,还勾勒出了在GPS信号缺失的环境中实现实时可靠运行的路线,这对于灾难响应、监控和自主交付等应用至关重要。
全球导航卫星系统 (GNSS),例如全球定位系统 (GPS),是无人机 (UAV) 导航的基础,但在城市峡谷、室内空间或信号受阻或干扰的恶劣环境中,其有效性会降低。传统上对 GPS 的依赖使无人机容易受到干扰,无论是来自高层建筑、天气状况还是网络攻击。
虽然惯性传感器和激光雷达等替代方案前景光明,但它们往往难以应对漂移和计算需求。基于视觉和地形辅助的系统可以提供可行的解决方案,但需要进一步改进才能适应动态环境。这凸显了对强大的多传感器融合框架的迫切需求,以便在GPS信号缺失的区域实现无人机的自主安全运行。
2025年4月7日,苏丹王子大学的一个研究团队在《卫星导航》期刊上发表了一篇关于无GPS环境下无人机导航的全面综述。该综述评估了132篇论文,重点关注绝对定位和相对定位技术,包括基于视觉的系统、激光雷达和地形辅助算法。
通过检验计算效率和传感器融合,该研究发现混合方法是无人机导航最可靠的解决方案。这项工作弥补了现有技术的重大空白,为GPS信号不可用的实际应用提供了实用的见解。
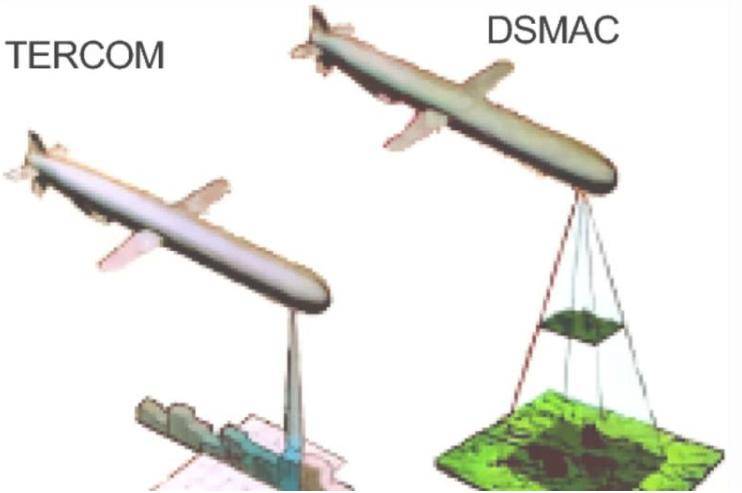
本综述探讨了在GPS信号缺失区域进行无人机导航的两种主要方法:绝对定位,使用预先映射的地形数据(例如TERCOM和DSMAC);以及相对定位,例如SLAM(同步定位与地图构建)和视觉惯性里程计,这些方法依赖于实时传感器数据。绝对定位在缺乏特征的环境中存在局限性,而相对定位技术则具有适应性,但需要大量的计算资源。
基于视觉的系统,尤其是在通过人工智能进行特征识别增强后,前景广阔,尽管光照条件仍然是一个挑战。该研究强调了传感器融合的重要性,表明将激光雷达、雷达和惯性测量与卡尔曼滤波器等先进的滤波技术相结合,可以显著提高导航可靠性。此外,实时处理至关重要,GPU 等硬件加速器和优化算法(例如 LSTM 网络)可以加快数据分析和决策速度。
虽然将地形地图与实时 SLAM 数据相结合的混合系统在准确性和灵活性之间取得了平衡,但该研究承认,需要进一步改进,以便在各种环境中扩展这些解决方案。人工智能处理能力和边缘计算的进步,对于在不可预测的现实条件下实现完全自主的无人机操作至关重要。
该研究的主要作者伊门·贾拉亚博士强调:“没有任何单一的传感器或算法能够解决GPS导航的所有挑战。我们的研究表明,将绝对定位和相对定位与多传感器融合相结合是实现可靠无人机导航的关键。未来的工作必须侧重于优化这些系统,以应对从人口稠密的城区到偏远灾区等各种环境的不可预测性。”
这项研究对依赖无人机的行业(例如物流、农业和国防)具有重要意义。向偏远地区或受灾地区运送医疗物资的无人机无需GPS即可运行,军用无人机则可以在信号干扰区域导航。
该研究还指出,需要建立监管框架来规范这些技术,确保其安全高效地融入未来的基础设施。随着无人机成为智慧城市和基础设施巡检不可或缺的一部分,克服GPS的局限性将确保更安全、更高效的运营。这些发现鼓励人们进一步投资于人工智能导航,并开展合作研究,以完善这些系统,使其在全球范围内得到应用。
更多信息: Imen Jarraya 等人,《GNSS 拒绝无人机导航:计算复杂度、传感器融合和定位方法分析》,《卫星导航》(2025 年)。