

英国布里斯托大学与伦敦玛丽女王大学联合研究团队开发出新型电致变形凝胶机器人,该机器人具备形状自适应能力和敏捷运动特性。这项发表于《先进材料》的研究展示了软体机器人技术的新进展。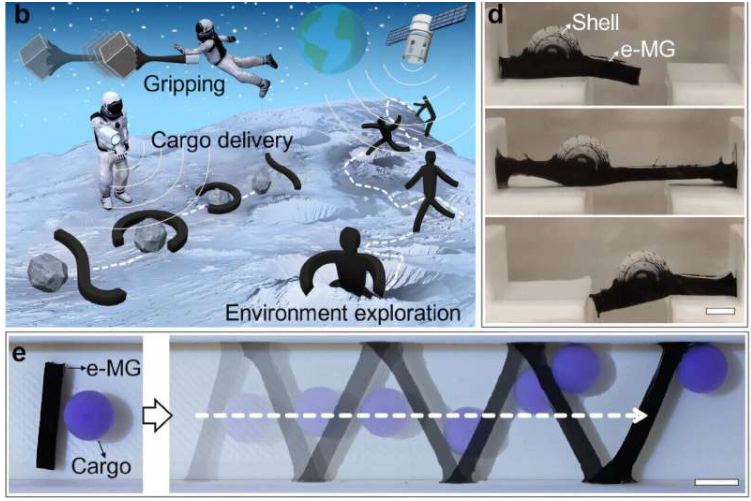
这种电致变形凝胶机器人采用特殊电致变形材料,通过超轻电极的电场控制实现形变功能。布里斯托大学研究员徐慈群表示:"我们的电致变形凝胶机器人标志着一项突破,为软体机器人技术发展铺平了道路。"该机器人能够以多种复杂方式弯曲、伸展和移动,其形变能力和运动范围超越现有机器人技术。
与传统刚性机器人相比,软体机器人具有更好的适应性和形变能力,在工业、医疗和可穿戴设备领域具有应用潜力。研究团队展示的电致变形凝胶机器人可进行大规模形变和连续运动,在10,000次驱动循环中保持稳定性能。徐慈群补充说明:"软体机器人的潜在应用范围广泛,从太空探索到医疗保健,其适应性可为传统机器人不适用的场景提供解决方案。"
这种电致变形凝胶机器人的几何结构可根据具体应用需求定制,视频资料显示其人形结构能够沿天花板摆动移动。该技术还可与传统刚性机器人结合,形成适用于复杂环境的混合系统。电致变形凝胶材料包含纳米晶体导体的软聚合物复合材料,通过电场实现远程精确控制。
软体机器人技术的发展为下一代智能机器人开发提供了新方向。这种电致变形凝胶机器人的成功研制,展示了电场控制技术在软体机器人领域的应用前景。
更多信息: Ciqun Xu 等,《电场驱动软变形物质》,《先进材料》(2025)。期刊信息: 先进材料