
四足机器人或成未来火星探测助手 行走间实时采集土壤数据
一项新研究显示,四足机器人在未来火星探测任务中可能成为宇航员的高效地表助手。该研究于本月早些时候在爱丁堡人机交互会议上公布,由俄勒冈州立大学、美国国家航空航天局约翰逊航天中心和南加州大学的科学家共同参与。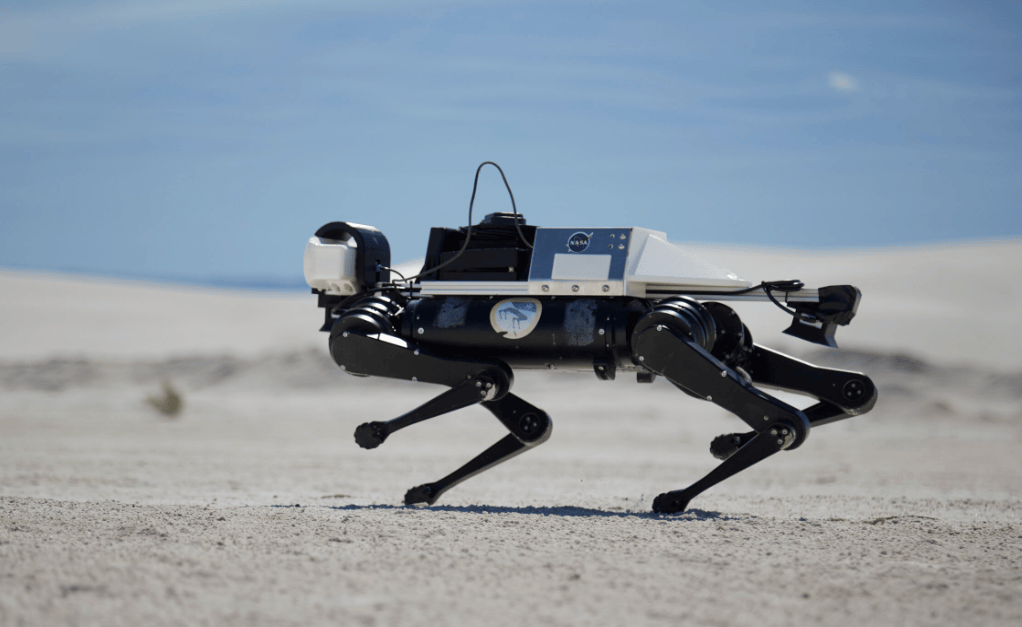
研究人员在白沙国家公园的石膏沙丘进行了模拟火星任务,测试四足机器人与人类科学家的协作能力。主要作者伊恩·兰金表示:“我们在白沙部署四足机器人,以探索宇航员科学家和机器人如何协同收集数据,选择此地是因为其沙丘与火星环境相似。”
兰金指出,四足机器人的腿部电机能通过行走实时测量土壤特性,无需额外仪器或停止移动,这与当前火星任务中轮式漫游车或旋翼飞行器的工作方式形成对比。他说:“四足机器人本身部分上是一种科学仪器:一种在每一步落足时生成数据的地形传感器。”
研究还探讨了多机器人系统的潜力,例如韩国科学技术院已提议使用漫游车群搜索月球水冰。兰金补充,未来可能部署多个四足机器人,以扩展地表科学家的探索范围,但具体方案需进一步研究。
相关推荐

空客牵头启动英国3800万英镑四年期DECSAM增材制造项目
2026-06-27

加拿大阿尔伯塔省5月对美铁路液化石油气出口量达520万桶
2026-06-27

美国用户Google Wallet支持包裹追踪
2026-06-27

巴西圣塞巴斯蒂安港获准将吃水深度提升至9.1米
2026-06-27

菲律宾海关局将在NAIA免税区设卫星办公室疏解航空货运拥堵
2026-06-27

TVH在比利时启用9200万美元Plant T物流设施
2026-06-27

美国联邦快递2026财年第四季度成立生命科学部门
2026-06-27

SSI Schaefer为德国Warema物流中心扩容90%
2026-06-27

越美海关签署电子数据交换合作备忘录
2026-06-27

德国邮政与DHL宣布2026年7月底起取消上门现金支付义务
2026-06-27
最新简讯