维度网讯,在工业自动化领域,处理具有非线性弹性和无限自由度的非刚性材料(如纺织品、柔性薄膜等)一直被视为运动控制的终极挑战。近日,总部位于亚特兰大的机器人及缝纫解决方案企业Softwear Automation Inc. 披露了其最新的机电架构。通过将操作员的“直觉”编码进数学框架,该公司成功在高速生产中复制了人类处理柔性材料的精细灵巧性,为柔性制造领域带来了决定性的技术进展。
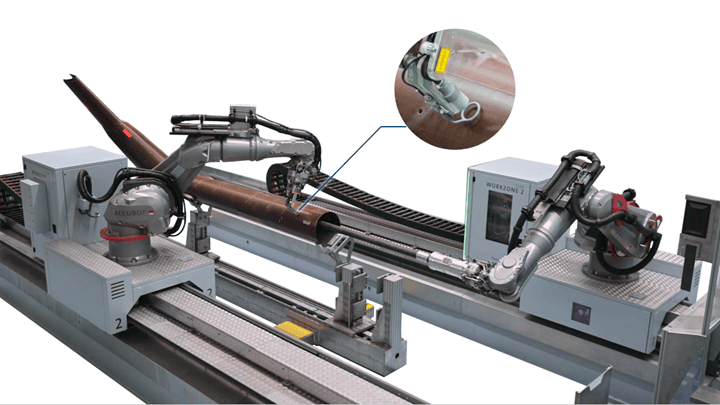
传统的自动化系统通常依赖气动驱动进行大宗运输,但空气的可压缩性带来的“挤压”效应会导致非线性延迟,无法满足复杂路径跟随的高频响应需求。为此,Softwear Automation 实施了一种混合机电控制层:将高力要求的初始定位留给气动系统,而一旦材料进入“主动处理区域”,则由高分辨率伺服电机驱动的精密机械连杆接管。这种设计确保了电机编码器计数与织物空间方向之间建立起严格的可预测关系,显著提升了柔性制造系统的确定性。
针对衬衫生产中常见的“三维圆形路径与二维线性缝纫机头”之间的几何悖论,该公司开发了同步双坐标转换方法。系统将材料运动视为笛卡尔坐标系($x, y$)与极坐标系($r, \theta$)之间的连续变换。通过基于雅可比矩阵(Jacobian matrix)的变换算法,系统根据部件的瞬时半径实时调节进给速率并补偿切向速度,确保材料在通过缝纫机头时保持线性呈现。
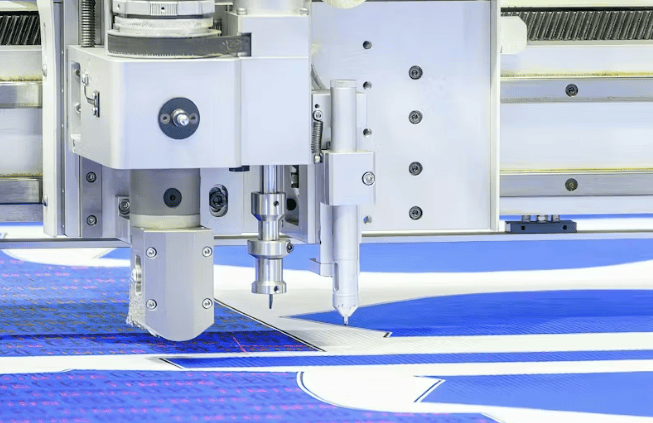
为了在 250 毫米/秒 的极高线性速度下维持闭环控制,该系统集成了被称为“电子视网膜”的高端机器视觉算法。该系统不仅跟踪材料边缘,还能对织物纹理的微观变化进行高频分析。这些实时数据被反馈至 PID 控制器,重点通过微分($K_d$)分量预测材料变形趋势,使机械连杆能在 20 毫秒 的极短窗口内完成轨迹调整。这种“感知型”闭环系统不仅提高了生产效率,更确保了在数百万次循环中维持亚毫米级的精度,柔性制造技术在处理复杂复合材料构件方面达到了新的高度。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告之,本站将予以修改或删除。邮箱:news@wedoany.com