维度网讯,德国航空航天中心(DLR)下属德国航天局正在推进“水手号峡谷探测器”(Valles Marineris Explorer,简称VaMEx)项目,目标是设计一种自主、异构的机器人群体,用于探索火星上的水手号峡谷。该峡谷是火星上的巨大裂谷系统,科学家希望在此搜寻可能存在于庇护性缝隙中的液态水痕迹,这些水可能作为生命的栖息地;但复杂地形给机器人勘测带来了挑战。
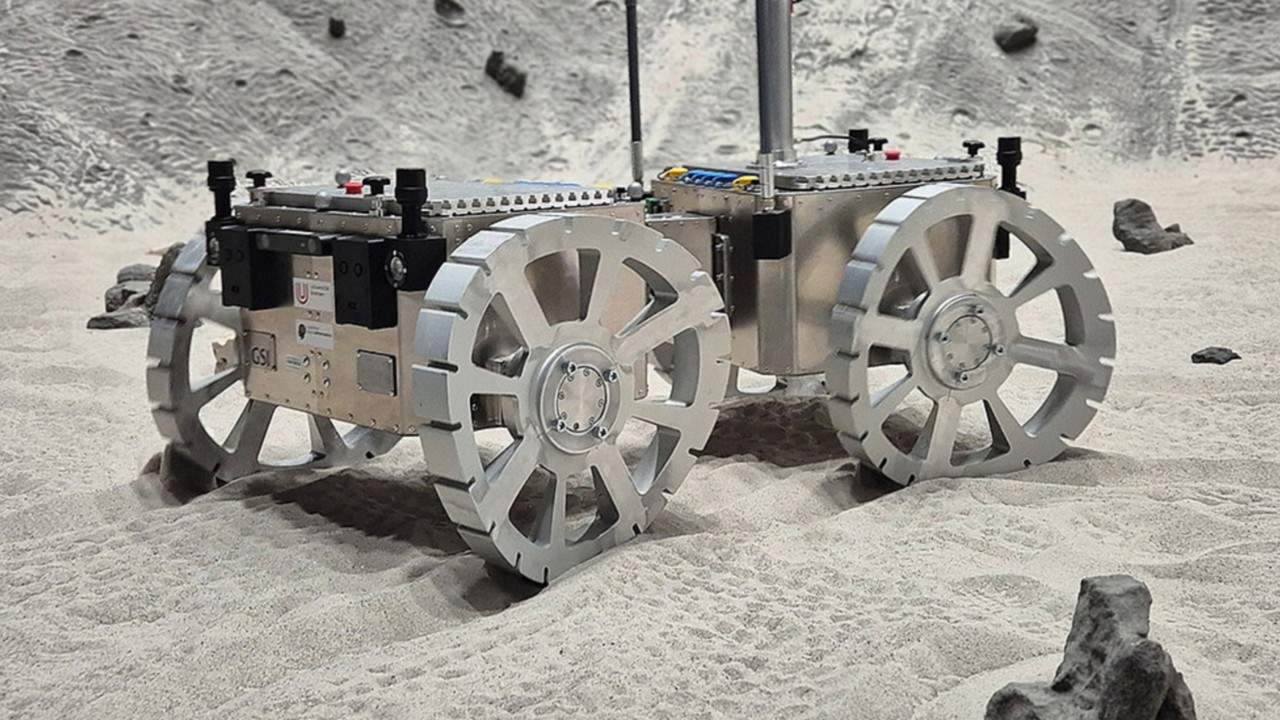
VaMEx团队正在探索驾驶、行走和飞行系统组合的方案,以充分利用不同概念在共同调查大面积区域时的优势。其中一种创新方法是配备弯曲车轮的火星车,这些车轮设计灵感来自沙漠蜥蜴的脚,可以在沙地中“游动”。维尔茨堡大学(University of Würzburg)的一个研究小组借鉴了沙鱼(sandfish)的运动方式,并将其改编应用到一辆火星车上,该火星车在穿越沙地方面的表现优于其他方式。维尔茨堡大学的专家与德国不来梅的DLR研究人员合作,设计了模仿沙鱼移动特性的火星车轮,可产生纵向和横向力,在沙地上留下正弦曲线或S形轨迹。
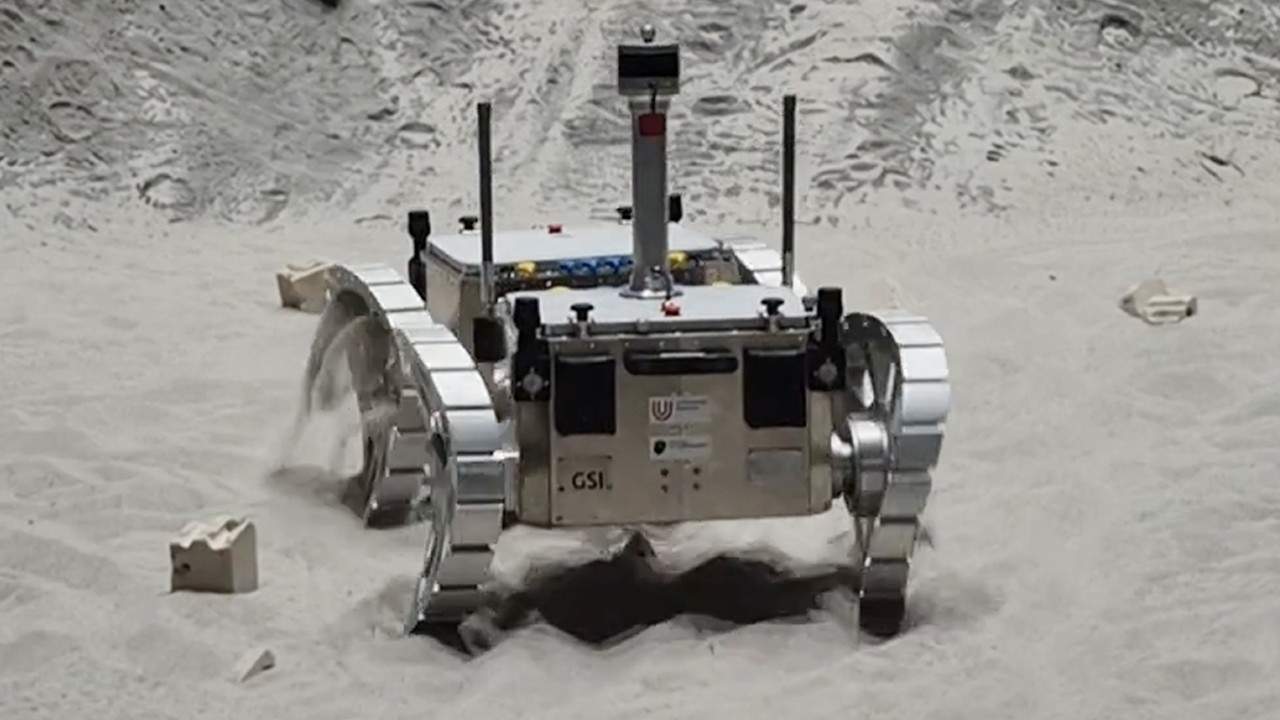
火星机械必须应对沙地、砾石、斜坡以及不平坦地形,同时保持机动性、稳定性和效率。大学计算机科学家、地球观测嵌入式系统与传感器(ESSEO)教席负责人马可·施密特(Marco Schmidt)正领导这项仿生机动性研究。施密特的团队在沙地和开阔地形上测试了这辆火星车,并与不来梅的德国人工智能研究中心(German Research Center for Artificial Intelligence)以及不来梅大学(University of Bremen)合作。施密特表示,结果显示车辆在沙地上稳定移动,但实验也明确指出需要改进的地方。沙鱼运动方式灵感来源于撒哈拉沙漠中的一种蜥蜴——Scincus scincus(沙鱼蜥),它能在沙漠沙地中挖掘洞穴并真正“游动”以捕食或躲避捕食者。
大学正在继续研究这种机动技术,预计进一步改进将提升在混合地形上的性能。ESSEO团队旨在扩大其对VaMEx的贡献,转向软件驱动的机动性。研究计划还要求开发明确考虑打滑、下陷以及地形与车轮相互作用的控制策略,最终实现火星车在颗粒状环境中更稳定、更适应的行为。SETI研究所、火星研究所(Mars Institute)、Ceres Robotics以及NASA艾姆斯研究中心(NASA Ames Research Center)的帕斯卡尔·李(Pascal Lee)补充道,创造能够可靠且高效地穿越火星广阔沙丘地带(不仅在水手号峡谷,而且在整个星球上)的机动性解决方案,是未来机器人及载人火星探索的关键。李并未参与本研究。有关DLR在火星车、履带车和无人机方面的工作——水手号峡谷探测器项目的详细信息,可访问项目网站。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com