维度网讯,瑞士洛桑联邦理工学院的工程师开发了一种新型机器人控制系统框架,能够将技能传授给具有不同机械设计的机器人,使其安全执行相同任务,而无需为每台机器人重新编写代码。这一成果为简化机器人编程提供了新的路径。
传统上,升级工业机器人车队通常意味着硬件更换与任务重新编程同步推进。即便两台机器设计用于类似工作,关节排列或运动限制的差异也会导致为一台机器人编写的程序无法直接用于另一台。据洛桑联邦理工学院工程师介绍,使技能在机器人之间直接转移可以让这些系统更具可持续性和成本效益。研究团队提出的“运动智能”概念,将人类演示的任务数学转化为通用运动策略,再根据机器人的物理设计进行调整,使不同机器人能够执行该任务。
学习算法与系统实验室主任奥德·比拉德博士表示:“这项工作解决了机器人学中的一个长期挑战:如何在保证安全且可预测行为的前提下,将学到的技能转移到具有不同机械结构的机器人上。这种方法可以显著减少在现实环境中部署机器人所需的时间和专业知识。”
为构建这一机器人控制系统框架,比拉德和同事首先通过动作捕捉技术记录人类演示的操作任务,随后将其数学转化为通用运动策略。团队还对不同机器人设计的物理限制进行了系统分类,包括关节活动范围以及为保持稳定必须避免的位置。该框架利用这一分类自动将通用运动策略调整到不同的机器人身体上,确保任务在机械限制内安全执行。
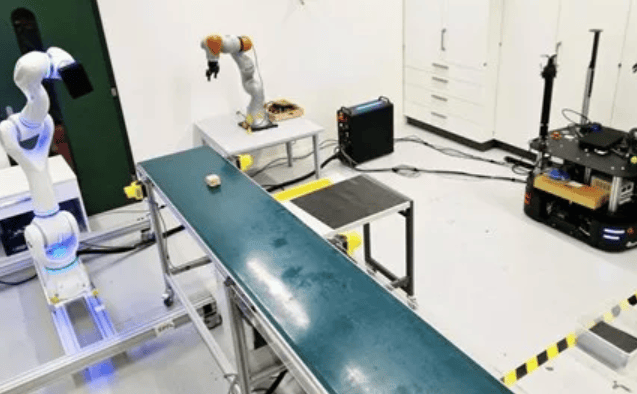
在一项装配线实验中,人类演示了将木块从传送带推到工作台上、放在桌子上并最终扔进篮子的任务。三种不同的商用机器人借助运动智能成功可靠地复制了这一序列,即使步骤分配发生变化,该机器人控制系统仍能顺利运行。比拉德指出,团队计划将框架扩展到人机协作和基于自然语言的交互等场景,使人们在家中通过简单命令即可指挥机器人,而无需技术编程背景。这一方法对硬件快速迭代的新兴机器人平台同样具有价值,跨平台技能的无缝转移将帮助这些平台实现实用化和可扩展应用。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com