
日本ACCESS公布VLA与IOWN APN远程实验
维度网讯,ACCESS在2026年6月25日公布了利用VLA(Vision-Language-Action,视觉-语言-动作)模型进行的远程机器人控制实验成果。实验证实,通过高质量通信网络,部分任务可在远程环境下实现与本地环境相近的响应性和动作质量。
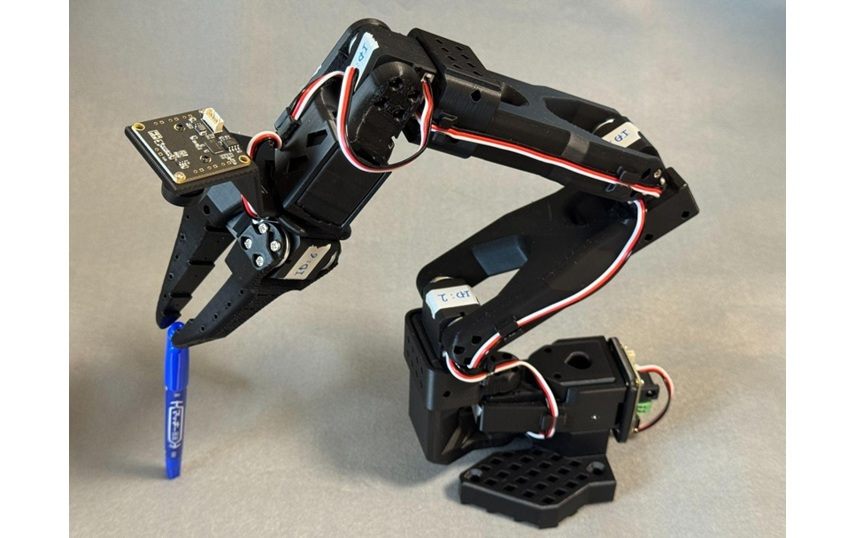
实验中,搭载了自行学习VLA模型的推理服务器与远程机器人通过网络连接,执行物体的抓取与搬运任务。实验比较了本地环境(推理服务器就近配置)与通过高品质光网络环境IOWN全光子网络(APN)进行远程连接的效果。构建IOWN APN环境时获得了NTT西日本的协助。
结果显示,在使用IOWN APN的远程环境中,部分任务能够实现与本地环境相近的、基于VLA模型的机器人控制。与本地环境相比,任务能够稳定执行,机器人动作的流畅性得以保持。据披露,该方法可有效抑制控制延迟和动作停止的发生频率。
利用VLA模型进行远程控制时,由于视频获取、AI推理、机器人控制相互协作的处理特性,容易受到通信延迟和抖动的影响。本实验通过使用IOWN APN,在远程环境中实现了部分任务的实时协作,从而确认了通信质量对操作性和作业效率有显著影响。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com
相关推荐
SambaNova拟以100亿美元估值再融资8~10亿美元
2026-06-26
中国凌川科技完成数亿元融资,全国产3D堆叠芯片流片
2026-06-26
中国金胜电子存储产品覆盖全球110余国
2026-06-26
中国信通院联合22家单位筹备成立AIIA词元服务工作组
2026-06-26
美国Lightware在InfoComm 2026展示向解决方案转型
2026-06-26
中国台湾世芯科技完成5.1亿美元GDS发行
2026-06-26

中国曹操出行今年将在阿联酋部署首支Robotaxi车队
2026-06-26

龙芯中科启动中国首个龙架构开源社区
2026-06-26

联想在中国推出AI Host mini,提供8000种AI技能
2026-06-26
韩国Sparrow在供应链安全研讨会上提出SBOM运营与管理策略
2026-06-26
最新简讯
1
最高暴涨37%!苏伊士运河宣布7月15日起上调通行附加费
2
美国布朗斯维尔港完成5亿美元航道疏浚工程
3
英国独立地产公司Seneca Property拟投1亿英镑收购英国优质写字楼
4
中石化炼化工程签约乌兹别克斯坦61亿美元生物燃料项目
5
中国河北石家庄地铁4号线祥新区间双线贯通,首穿21股铁路
6
印度Hero MotoCorp与WeWork租赁德里35万方办公室 租金超92亿卢比
7
WGC 2026圆桌会议聚焦地热直接利用,冰岛发布应用手册
8
德国销售租赁企业Kunze接收54米蜘蛛式升降机
9
中国化学工程参加第九届中国-亚欧博览会并开展合作会谈
10
英国城市起重租赁公司购入斯皮尔林SK1265-AT6起重机