维度网讯,日本宇宙航空研究开发机构(JAXA)联合多家机构开发的球形变形探测车SORA-Q,在月球表面成功完成自主导航与通信测试,为微型自主月球机器人技术验证提供了依据。
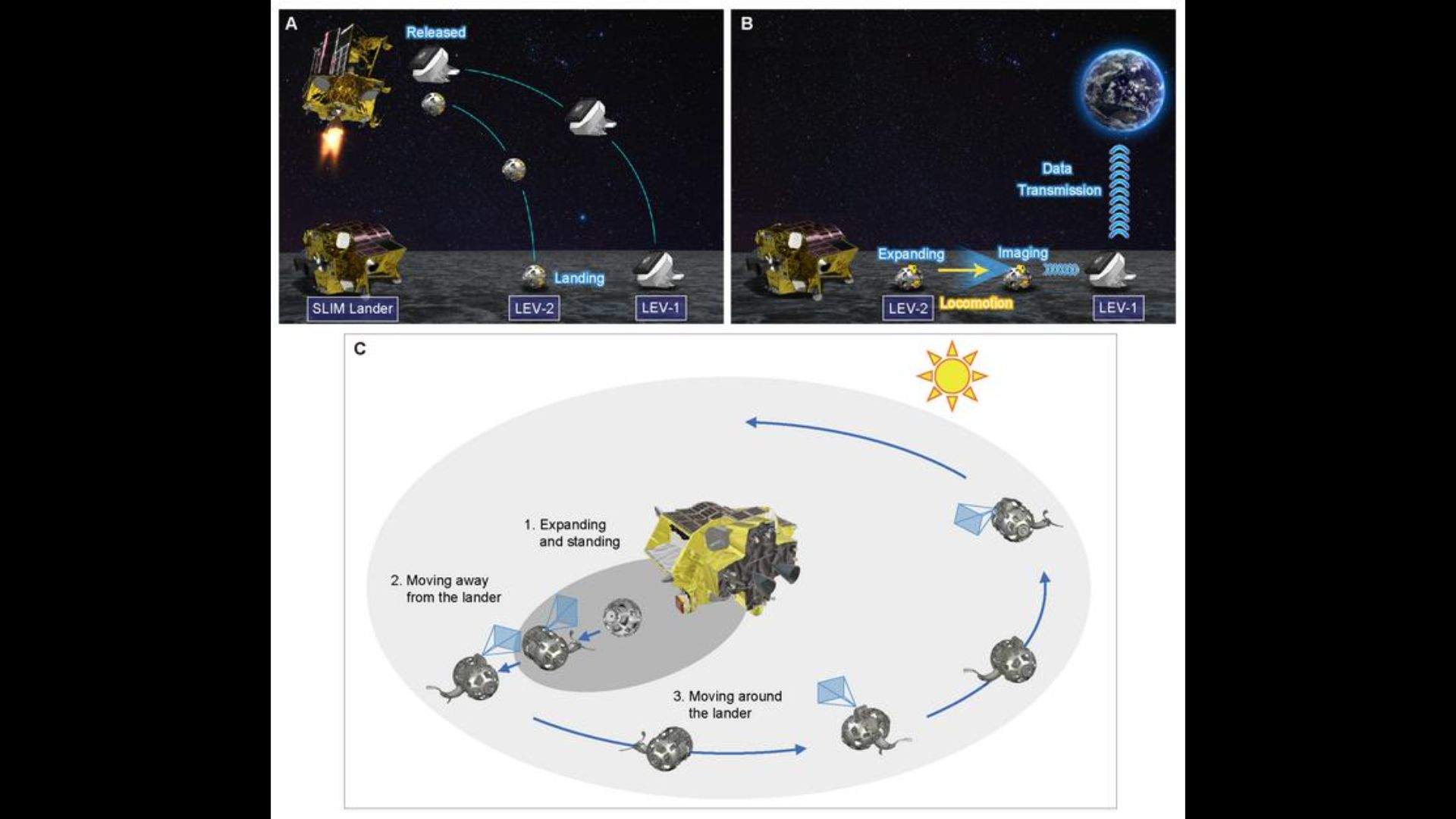
SORA-Q直径约8厘米(3英寸),于2023年12月搭载JAXA的“智能月球调查着陆器”(Smart Lander for Investigating Moon,SLIM)任务飞往月球。2024年1月19日,SLIM在月球表面着陆,并迅速部署了网球大小的SORA-Q探测车(代号LEV-2)以及另一台名为月球漫游车-1(Lunar Excursion Vehicle-1,LEV-1)的跳跃机器人。SLIM是日本首个实现月面软着陆的任务。
这款探测车由JAXA、索尼、同志社大学以及玩具公司Takara-TOMY联合开发。Takara-TOMY利用其在设计“变形金刚”系列玩具(该品牌与孩之宝共同拥有)中积累的技术,赋予SORA-Q变形能力。其变形机制为:从球形扩展为近似圆柱体,利用原始球形的两个半球作为轮子,摄像头在两个轮子之间向上翻转,尾部展开充当后稳定器。变形后,SORA-Q能够在SLIM着陆器周围行驶,拍摄着陆器和月球环境的彩色图像。SLIM着陆点靠近宽约270米(885英尺)的陨石坑“Shioli”,该坑位处于宽约98公里(61英里)的“Cyrillus”陨石坑内,后者位于月球正面的“酒海”中。
该月球漫游车由JAXA的Daichi Hirano领导的团队设计,其目标是在小型封装中实现自主性,以避免增大有效载荷质量和成本,并使探测车能够进入大型设备无法到达的裂隙等狭小空间。
由于体积限制,SORA-Q和LEV-1无法集成所有功能,因此两台机器人协同工作,共同探索并将数据传回地球。其中的自主性包括能够通过摄像头图像导航,自动绕过陨石坑和凹坑等障碍物,无需任务控制中心介入,从而自主到达目的地。
Daichi Hirano及其团队在描述任务结果的研究论文中指出:“尽管单个小型探测车的能力固有局限,但结果凸显了此类平台作为独立探测器、能够进入主要大型航天器无法到达的环境的潜力。”
与这两个小型机器人的通信在约100分钟后中断,比SORA-Q的预期寿命短了20至30分钟。Hirano将探测车任务提前结束归因于LEV-1的跳跃运动导致某些部件损坏,或LEV-1电池耗尽,两种情况均阻止了数据传回地球。
相关成果发表于《科学机器人》(Science Robotics)期刊。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com