
哈佛大学研发新型3D打印技术,提升软体机器人制造效率
2026-02-27 14:14
收藏
马萨诸塞州剑桥讯——哈佛大学研究人员近日公布了一项新的3D打印技术,该方法能够更简便地制造出可预测弯曲、变形和抓握的软体机器人设备。这项创新有望推动软体机器人在医疗、工业等领域的应用。
软体机器人通常由柔性材料构成,广泛应用于多个行业,但精确控制其弯曲和运动模式一直是制造过程中的一大难题。发表在《先进材料》期刊上的研究介绍了一种新方法,通过打印带有内置中空通道的结构,利用空气加压使这些通道按预设方向变形,从而实现对运动的编程控制。
该技术基于旋转多材料3D打印工艺,单个喷嘴可同时处理多种材料。打印机通过旋转和调整方向,以定制化模式挤出墨水,构建出复杂的内部几何形状。
研究人员使用这项3D打印技术打印出具有聚氨酯外壳和内通道的细丝,内通道材料为泊洛沙姆,这是一种常见于发胶的聚合物。通过调控喷嘴设计、旋转速度和材料流动,他们精确设定了每个通道的尺寸、形状和走向。
外壳固化后,团队洗去内部材料,形成带有空腔的管状结构。这些通道在空气加压下可向不同方向弯曲,为可膨胀、收缩和抓握的软体设备提供了基础模块。
这项工作由研究生Jackson Wilt和前博士后研究员Natalie Larson在哈佛大学约翰·A·保尔森工程与应用科学学院的Jennifer Lewis教授实验室主导。Lewis教授专注于生物启发工程领域。
“在这项工作中,我们没有使用模具。我们直接打印结构,快速编程,并能够灵活定制驱动方式,”Wilt说。
为展示技术潜力,团队以单一连续路径打印出螺旋花形图案,并制作了一个具有类似关节弯曲功能的五指手柄。Wilt指出,这项技术可应用于手术机器人和辅助设备等多种场景,提升软体机器人的制造效率和功能性。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
1
韩国SK集团2.3万亿韩元向斗山转让SK siltron
2
中国电动汽车充电桩CCC认证8月1日起强制实施
3
全球单厂规模最大“万能辅料”高端聚乙烯醇生产基地在重庆建成
4
奇瑞将向韩国车企 KG Mobility 投资 7500 万美元,深化海外市场布局
5
金风科技助力南非Ummbila风电场一期155MW投运
6
中国钠离子电池走向量产,将成多元化电池体系重要组成
7
多瑙河水位创纪录下降 匈牙利波克什核电站40年来首次停运
8
霍尔木兹海峡航运受阻致日本二季度电价同比涨30%
9
2026下半年巴西阿罗巴价格或回升,最乐观预测达400雷亚尔
10
“欧佩克+”主要产油国决定9月继续增产



相关推荐

英国Rockleigh购入两台RA21蜘蛛式升降机
2026-08-02

澳大利亚Loughlin购入22吨Franna AT22-2
2026-08-02

印度Sterlite获11亿美元订单 受益AI数据中心热潮
2026-08-02

美国菲利普斯向海军学校交付12套混合制造及12套复合材料系统
2026-08-02

德国Gefertec推出Arctitan钛金属3D打印系统
2026-08-02

岚图汽车2026年7月交付13189辆
2026-08-02

中国山东新能船业7月向多国交付船舶,单月交付额破2亿元
2026-08-01

法国ENGO完成3934万元融资,布局Micro OLED智能运动眼镜
2026-08-01

英国RMP投资Ficep系统2025年实现板材产能翻倍
2026-08-01
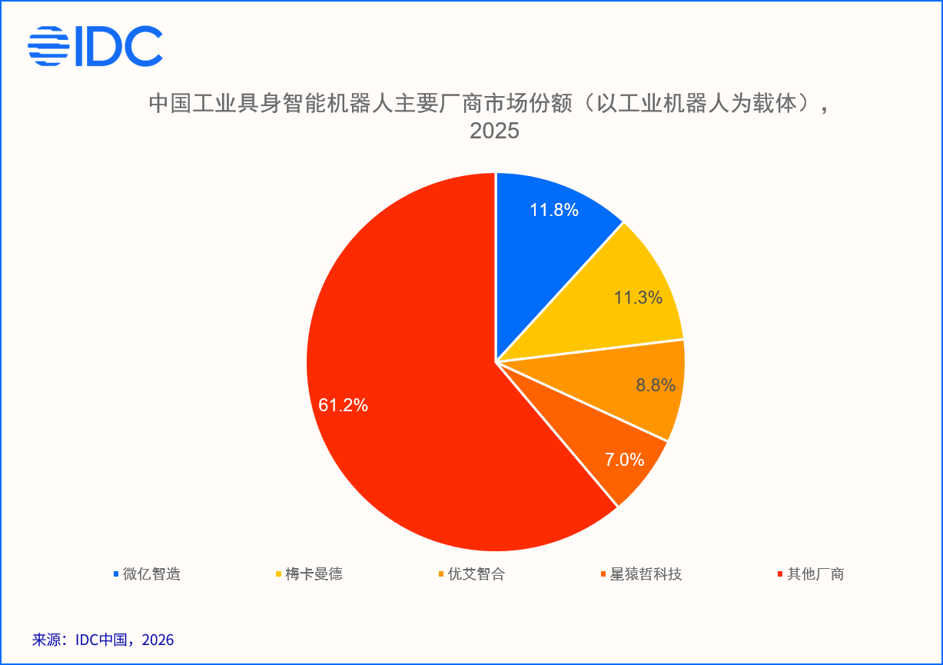
IDC:2025年中国工业具身智能机器人市场达57.4亿元
2026-08-01