维度网讯,西门子企业研究部门正在推动柔性机器人技术从实验室原型走向实际工业应用。领导该部门基础技术研究与预开发的卡尔·莫斯博士(Dr. Kal Mos)当前的核心任务,是将柔性机器人系统转化为能够在工厂和仓库等不稳定环境中可靠运行的商业解决方案。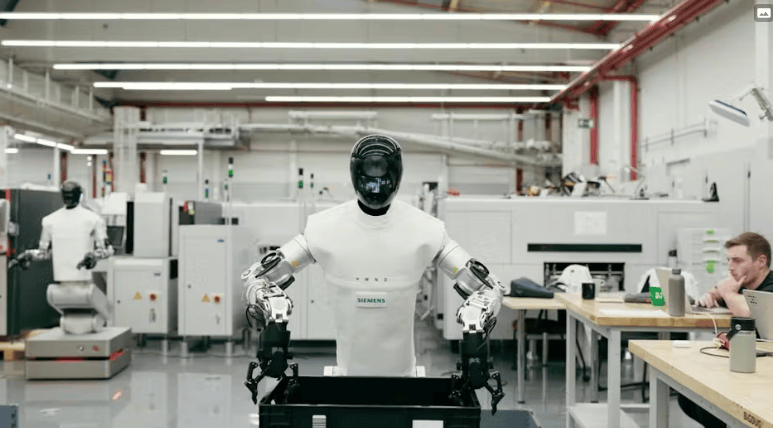
在西门子基础技术(Siemens Foundational Technologies)团队上任九个月后,莫斯正致力于解决一个关键工程问题:如何让在受控环境下表现良好的技术,变成面对现实世界依然稳健且商业可行的产品。这项工作的重心在于仿真。训练机器人系统长久以来依赖于将现实世界数据与受控环境中的大规模仿真相结合。大约18个月前,西门子通过让机器人观察人类操作来开发其程序。这一过程被称为视觉-语言-动作(VLA)模型,它使机器人能够观察一项任务,进行推理,并自行执行。该过程从远程操作开始,人类重复相同任务数百次,机器人则同时观察、记录并学习动作。这些数据被用于微调模型,教会它应对变化。随后,研究人员评估模型效果,构建一个闭环仿真系统。莫斯解释,闭环仿真意味着机器人具备感知能力,能通过大量传感器感知周围环境。不过,他同时指出,创造完全自主的机器人目前仍是研究目标,在现实中尚不存在。
目前,西门子在其自有工厂中已部署了一些原型机,并积极投入生产过程。这些机器人被称作“柔性机器人”,因为它们并非完全自主,也不是传统意义上的预先编程。操作员不编写所有步骤,而是仅分配任务,让机器人自行找出完成任务的中间步骤。一旦部署,系统便进入一个闭环仿真环境,基于AI模型,通过重复演示来优化任务。机器人使用传感器感知环境,根据实时数据调整动作,并在观察、行动、调整的迭代循环中运行,训练其在受控环境之外也能正常作业。这种柔性机器人是实现更独立机器的初步步骤。在生产车间,这种能力体现为移动操作器——将机械臂与移动底座相结合的系统。它们虽未达到完全自主,却能以一定独立性执行特定任务,初步弥合了指令与主动性之间的差距。
在2026年汉诺威工业博览会(Hannover Messe 2026)的西门子创新中心,公司展示了工业AI如何塑造自主工业的未来。一个案例中,工业视觉AI帮助拣选机器人识别和处理各种物体。该AI能在毫秒级分析物体的形状、尺寸或包装,配合真空驱动的多抓手,机器人得以在流水线上更高效地移动物品。Simatic Robot Pick AI Pro 这一产品有助于克服此前难以应对的复杂内部物流挑战。莫斯指出,拾取固体或柔性材料对人类而言轻而易举,但对机器人却是巨大挑战。其核心难点在于处理柔软物体时的感知与控制——机器人需精确把握施加的压力,避免使物体变形或损坏。当需要将一个物体放入另一个柔性容器(如将多个物品装入塑料袋)时,复杂度进一步增加,因为物体和袋子的形状可能不可预测地变化,机器人必须依赖力与扭矩传感器以及感知系统不断调整抓取和运动。西门子并未追求通用型人工智能,而是集中于开发数量更少、定义更明确的用例。莫斯表示,缩小范围能让开发人员更有效、更可靠地训练系统,最终目标是实现完全自主。即便如此,前进的道路仍需要大量的劳动密集型工作。
制造与物流企业正越来越多地将双足系统视为自动化的下一步。2026年汉诺威工业博览会上,至少有15家参展商展示了专为真实生产线上部署而设计的机器人,它们旨在融入现有工作流程并承担更复杂的任务。在莫斯看来,问题并非人形机器人是否适用于工业,而是它们是否在本质上优于传统自动化。他认为,偏好最终取决于“价值与成本之间的等式”。由于人类世界——桌椅、交通工具和工厂——都是为人类打造的,能够以类似方式在相同空间中移动的机器将具有巨大价值。不过,达成这一目标的道路可能是渐进的。莫斯认为,在实现成本合理的里程碑之前,轮式机器人可能更具价值。短期内,更简单的平台可能提供更大的实用性:它们移动更方便,可携带更大电池,也避免了腿部设计带来的诸多稳定性挑战。西门子自身不从事机器人硬件的开发,而是通过以软件为中心的策略,聚焦于机器人的智能与编排层,目标是提升决策能力与系统集成水平。
作为媒体参观的一部分,《机器设计》(Machine Design)杂志走访了西门子位于德国埃尔兰根的电子工厂,实地观察了这一战略的应用。在那里,西门子与英国AI及机器人公司Humanoid合作,共同开发Humanoid的HMND 01轮式Alpha机器人,旨在执行自主物流任务,且无需增加额外硬件。该合作基于英伟达(NVIDIA)AI堆栈上的基础AI模型。西门子的思路并非为处理织物设计新抓手,而是开发能使现有机器人理解如何抓取、如何调整力量,并与生产线中其他机器协调的AI。在这种环境下,西门子Xcelerator平台提供了数字孪生、仿真环境,并编排连接人形机器人设计、仿真、工业控制与分析的数据流,使其能够实现实时监控与更新。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com